直流伺服電機(jī)有哪些應(yīng)用領(lǐng)域,?數(shù)控機(jī)床中的伺服系統(tǒng)分析,!
無(wú)刷直流伺服電機(jī)克服了有刷直流電機(jī)的先天性缺陷,,以電子換向器取代了機(jī)械換向器,,所以無(wú)刷直流電機(jī)既具有直流電機(jī)良好的調(diào)速性能等特點(diǎn),又具有交流電機(jī)結(jié)構(gòu)簡(jiǎn)單,、無(wú)換向火花,、運(yùn)行可靠和易于維護(hù)等優(yōu)點(diǎn)。無(wú)刷直流電機(jī)的實(shí)質(zhì)是直流電源輸入,,采用電子逆變器將直流電轉(zhuǎn)換為交流電,,有轉(zhuǎn)子位置反饋的三相交流永磁同步電機(jī),。性能上相較一般的傳統(tǒng)直流電機(jī)有很大優(yōu)勢(shì),是當(dāng)今最理想的調(diào)速電機(jī),。
無(wú)刷直流伺服電機(jī)簡(jiǎn)介
BLDC電機(jī)中的“BL”意為“無(wú)刷”,,就是DC電機(jī)(有刷電機(jī))中的“電刷”沒有了,。
無(wú)刷直流電機(jī)(BLDC)以電子換向器取代了機(jī)械換向器,所以無(wú)刷直流電機(jī)既具有直流電機(jī)良好的調(diào)速性能等特點(diǎn),,又具有交流電機(jī)結(jié)構(gòu)簡(jiǎn)單,、無(wú)換向火花、運(yùn)行可靠和易于維護(hù)等優(yōu)點(diǎn),。
無(wú)刷直流電機(jī)主要由用永磁材料制造的轉(zhuǎn)子,、帶有線圈繞組的定子和位置傳感器(可有可無(wú))組成??梢?,它和直流電機(jī)有著很多共同點(diǎn),定子和轉(zhuǎn)子的結(jié)構(gòu)差不多(原來(lái)的定子變?yōu)檗D(zhuǎn)子,,轉(zhuǎn)子變?yōu)槎ㄗ?,,繞組的連線也基本相同。但是,,結(jié)構(gòu)上它們有一個(gè)明顯的區(qū)別:無(wú)刷直流電機(jī)沒有直流電機(jī)中的換向器和電刷,,取而代之的是位置傳感器。這樣,,電機(jī)結(jié)構(gòu)就相對(duì)簡(jiǎn)單,降低了電機(jī)的制造和維護(hù)成本,,但無(wú)刷直流電機(jī)不能自動(dòng)換向(相),,犧牲的代價(jià)是電機(jī)控制器成本的提高(如同樣是三相直流電機(jī),有刷直流電機(jī)的驅(qū)動(dòng)橋需要 4 只功率管,,而無(wú)刷直流電機(jī)的驅(qū)動(dòng)橋則需要 6 只功率管),。
無(wú)刷直流伺服電機(jī)應(yīng)用領(lǐng)域
應(yīng)用領(lǐng)域一,辦公計(jì)算機(jī)外圍設(shè)備,、電子數(shù)碼消費(fèi)品領(lǐng)域,。
這是無(wú)刷直流電機(jī)普及最廣、數(shù)量最大的領(lǐng)域,。比如在生活中常見的打印機(jī),、傳真機(jī)、復(fù)印機(jī),、硬盤驅(qū)動(dòng)器,、軟盤驅(qū)動(dòng)器,、電影攝影機(jī)、磁帶記錄儀等,,在它們的主軸和附屬運(yùn)動(dòng)的帶動(dòng)控制中,,都有無(wú)刷直流電機(jī)的身影。
應(yīng)用領(lǐng)域二,,工業(yè)控制領(lǐng)域,。
近些年,由于無(wú)刷直流電機(jī)大規(guī)模的研發(fā)和技術(shù)的逐漸成熟,,其驅(qū)動(dòng)系統(tǒng)在工業(yè)生產(chǎn)中的分布范圍也隨之?dāng)U大,,已逐步成為工業(yè)用電動(dòng)機(jī)的發(fā)展主流。圍繞降低生產(chǎn)成本和提高運(yùn)行效率而展開的研究與嘗試已取得顯著的效益,,各大廠商也提供不同型號(hào)的電機(jī)以滿足不同驅(qū)動(dòng)系統(tǒng)的需求?,F(xiàn)階段在紡織、冶金,、印刷,、自動(dòng)化生產(chǎn)流水線、數(shù)控機(jī)床等工業(yè)生產(chǎn)方面,,無(wú)刷直流電機(jī)都有涉獵,。
應(yīng)用領(lǐng)域三,醫(yī)療設(shè)備領(lǐng)域,。
在國(guó)外,,對(duì)無(wú)刷直流電機(jī)的使用已經(jīng)較為普遍,可以用來(lái)驅(qū)動(dòng)人工心臟中的小型血泵;在國(guó)內(nèi),,手術(shù)用高速器具的高速離心機(jī),、熱像儀和測(cè)溫儀的紅外激光調(diào)制器都使用了無(wú)刷直流電機(jī)。
應(yīng)用領(lǐng)域四,,汽車領(lǐng)域,。
據(jù)分析在市面上,一般的家用轎車需要永磁電機(jī) 20-30 個(gè),,而每輛豪華轎車則需要59個(gè)之多,,除了核心發(fā)動(dòng)機(jī)外,在雨刷器,、電動(dòng)車門,、汽車空調(diào)、電動(dòng)車窗等部位都有電機(jī)的身影,。隨著汽車工業(yè)向著節(jié)能環(huán)保的方向發(fā)展,,所使用的電機(jī)也必須滿足高效率、低能耗的標(biāo)準(zhǔn)。而無(wú)刷直流電機(jī)的低噪聲,、壽命長(zhǎng),、無(wú)火花干擾、方便集中控制等優(yōu)點(diǎn)完全符合,,隨著其調(diào)速技術(shù)的日益成熟,,性價(jià)比會(huì)越來(lái)越高,它在汽車電機(jī)驅(qū)動(dòng)的各個(gè)環(huán)節(jié)中的應(yīng)用會(huì)更加廣泛,。
應(yīng)用領(lǐng)域五,,家用電器領(lǐng)域。
“變頻”技術(shù)已非常普遍,,作為中國(guó)家電的標(biāo)志逐漸占據(jù)了大部分的消費(fèi)市場(chǎng),,“直流變頻”受到生產(chǎn)廠商的青睞,已有逐漸替換掉“交流變頻”的轉(zhuǎn)變趨勢(shì),。這種轉(zhuǎn)變實(shí)質(zhì)上就是家電所用的電動(dòng)機(jī)由感應(yīng)電動(dòng)機(jī)向無(wú)刷直流電機(jī)及其控制器的過(guò)渡,,以達(dá)到節(jié)能環(huán)保、低噪智能,、舒適性高的要求,。無(wú)刷直流電機(jī)的發(fā)展方向與電力電子、傳感器,、控制理論等技術(shù)的發(fā)展方向相同,,它是多種技術(shù)相結(jié)合的產(chǎn)物,它的發(fā)展取決于與之相關(guān)的每一種技術(shù)的革新與進(jìn)步,。
無(wú)刷直流伺服電機(jī)有以下特點(diǎn)
無(wú)刷直流電機(jī)的外特性好,,能夠在低速下輸出大轉(zhuǎn)矩,使得它可以提供大的起動(dòng)轉(zhuǎn)矩;
無(wú)刷直流電機(jī)的速度范圍寬,,任何速度下都可以全功率運(yùn)行;
無(wú)刷直流電機(jī)的效率高,、過(guò)載能力強(qiáng),使得它在拖動(dòng)系統(tǒng)中有出色的表現(xiàn);
無(wú)刷直流電機(jī)的再生制動(dòng)效果好,,由于它的轉(zhuǎn)子是永磁材料,,制動(dòng)時(shí)電機(jī)可以進(jìn)入發(fā)電機(jī)狀態(tài);
無(wú)刷直流電機(jī)的體積小,功率密度高;
無(wú)刷直流電機(jī)無(wú)機(jī)械換向器,,采用全封閉式結(jié)構(gòu),可以防止塵土進(jìn)入電機(jī)內(nèi)部,,可靠性高;
無(wú)刷直流電機(jī)比異步電機(jī)的驅(qū)動(dòng)控制簡(jiǎn)單,。
無(wú)刷直流伺服電機(jī)工作原理
無(wú)刷直流電機(jī)的定子是線圈繞組電樞,轉(zhuǎn)子是永磁體,。如果只給電機(jī)通以固定的直流電流,,則電機(jī)只能產(chǎn)生不變的磁場(chǎng),電機(jī)不能轉(zhuǎn)動(dòng)起來(lái),只有實(shí)時(shí)檢測(cè)電機(jī)轉(zhuǎn)子的位置,,再根據(jù)轉(zhuǎn)子的位置給電機(jī)的不同相通以對(duì)應(yīng)的電流,,使定子產(chǎn)生方向均勻變化的旋轉(zhuǎn)磁場(chǎng),電機(jī)才可以跟著磁場(chǎng)轉(zhuǎn)動(dòng)起來(lái),。
為了方便描述,,電機(jī)定子的線圈中心抽頭接電機(jī)電源 POWER,各相的端點(diǎn)接功率管,,位置傳感器導(dǎo)通時(shí)使功率管的 G極接 12V,,功率管導(dǎo)通,對(duì)應(yīng)的相線圈被通電,。由于三個(gè)位置傳感器隨著轉(zhuǎn)子的轉(zhuǎn)動(dòng),,會(huì)依次導(dǎo)通,使得對(duì)應(yīng)的相線圈也依次通電,,從而定子產(chǎn)生的磁場(chǎng)方向也不斷地變化,,電機(jī)轉(zhuǎn)子也跟著轉(zhuǎn)動(dòng)起來(lái),這就是無(wú)刷直流電機(jī)的基本轉(zhuǎn)動(dòng)原理——檢測(cè)轉(zhuǎn)子的位置,,依次給各相通電,,使定子產(chǎn)生的磁場(chǎng)的方向連續(xù)均勻地變化。
無(wú)刷直流伺服電機(jī)的驅(qū)動(dòng)方法
無(wú)刷直機(jī)電機(jī)的驅(qū)動(dòng)方式按不同類別可分多種驅(qū)動(dòng)方式,,它們各有特點(diǎn),。
1.按驅(qū)動(dòng)波形:方波驅(qū)動(dòng),這種驅(qū)動(dòng)方式實(shí)現(xiàn)方便,,易于實(shí)現(xiàn)電機(jī)無(wú)位置傳感器控制;
2.正弦驅(qū)動(dòng):這種驅(qū)動(dòng)方式可以改善電機(jī)運(yùn)行效果,,使輸出力矩均勻,但實(shí)現(xiàn)過(guò)程相對(duì)復(fù)雜,。同時(shí),,這種方法又有 SPWM 和 SVPWM(空間矢量 PWM)兩種方式,SVPWM的效果好于 SPWM,。
數(shù)控機(jī)床中的伺服系統(tǒng)分析
一,、概述
作為數(shù)控機(jī)床的執(zhí)行機(jī)構(gòu),伺服系統(tǒng)將電力電子器件,、控制,、驅(qū)動(dòng)及保護(hù)等集為一體,并隨著數(shù)字脈寬調(diào)制技術(shù),、特種電機(jī)材料技術(shù),、微電子技術(shù)及現(xiàn)代控制技術(shù)的進(jìn)步,經(jīng)歷了從步進(jìn)到直流,,進(jìn)而到交流的發(fā)展歷程,。數(shù)控機(jī)床中的伺服系統(tǒng)種類繁多,本文通過(guò)分析其結(jié)構(gòu)及簡(jiǎn)單歸分,對(duì)其技術(shù)現(xiàn)狀及發(fā)展趨勢(shì)作簡(jiǎn)要探討,。
伺服系統(tǒng)是以機(jī)械運(yùn)動(dòng)的驅(qū)動(dòng)設(shè)備,,電動(dòng)機(jī)為控制對(duì)象,以控制器為核心,,以電力電子功率變換裝置為執(zhí)行機(jī)構(gòu),,在自動(dòng)控制理論的指導(dǎo)下組成的電氣傳動(dòng)自動(dòng)控制系統(tǒng)。
二,、伺服系統(tǒng)的結(jié)構(gòu)及分類
根據(jù)驅(qū)動(dòng)電動(dòng)機(jī)的類型,,可將其分為直流伺服和交流伺服;根據(jù)控制器實(shí)現(xiàn)方法的不同,可將其分為模擬伺服和數(shù)字伺服;根據(jù)控制器中閉環(huán)的多少,,可將其分為開環(huán)控制系統(tǒng),、單環(huán)控制系統(tǒng)、雙環(huán)控制系統(tǒng)和多環(huán)控制系統(tǒng),??紤]伺服系統(tǒng)在數(shù)控機(jī)床中的應(yīng)用,本文首先按機(jī)床中傳動(dòng)機(jī)械的不同將其分為進(jìn)給伺服與主軸伺服,,然后再根據(jù)其他要素來(lái)探討不同伺服系統(tǒng)的技術(shù)特性,。
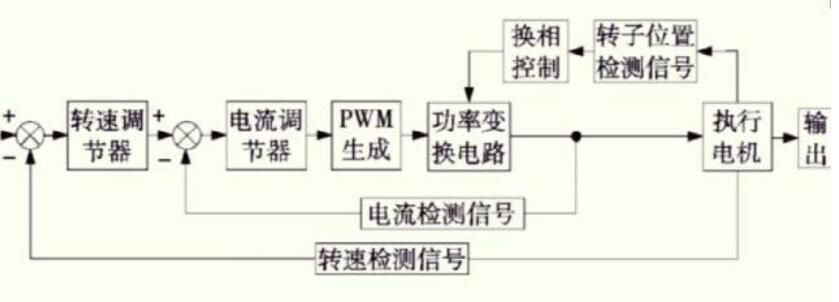
從基本結(jié)構(gòu)來(lái)看,伺服系統(tǒng)主要由三部分組成:控制器,、功率驅(qū)動(dòng)裝置,、反饋裝置和電動(dòng)機(jī)(圖1)??刂破靼凑諗?shù)控系統(tǒng)的給定值和通過(guò)反饋裝置檢測(cè)的實(shí)際運(yùn)行值的差,,調(diào)節(jié)控制量;功率驅(qū)動(dòng)裝置作為系統(tǒng)的主回路,一方面按控制量的大小將電網(wǎng)中的電能作用到電動(dòng)機(jī)之上,,調(diào)節(jié)電動(dòng)機(jī)轉(zhuǎn)矩的大小,,另一方面按電動(dòng)機(jī)的要求把恒壓恒頻的電網(wǎng)供電轉(zhuǎn)換為電動(dòng)機(jī)所需的交流電或直流電;電動(dòng)機(jī)則按供電大小拖動(dòng)機(jī)械運(yùn)轉(zhuǎn)。
三,、進(jìn)給伺服系統(tǒng)的現(xiàn)狀與展望
進(jìn)給伺服以數(shù)控機(jī)床的各坐標(biāo)為控制對(duì)象,,產(chǎn)生機(jī)床的切削進(jìn)給運(yùn)動(dòng)。為此,,要求進(jìn)給伺服能快速調(diào)節(jié)坐標(biāo)軸的運(yùn)動(dòng)速度,,并能精確地進(jìn)行位置控制。具體要求其調(diào)速范圍寬,、位移精度高,、穩(wěn)定性好、動(dòng)態(tài)響應(yīng)快,。根據(jù)系統(tǒng)使用的電動(dòng)機(jī),進(jìn)給伺服可細(xì)分為步進(jìn)伺服、直流伺服,、交流伺服和直線伺服,。
(一)步進(jìn)伺服系統(tǒng)
步進(jìn)伺服結(jié)構(gòu)簡(jiǎn)單,符合系統(tǒng)數(shù)字化發(fā)展需要,,但精度差,、能耗高、速度低,,且其功率越大移動(dòng)速度越低,。特別是步進(jìn)伺服易于失步,使其主要用于速度與精度要求不高的經(jīng)濟(jì)型數(shù)控機(jī)床及舊設(shè)備改造,。但近年發(fā)展起來(lái)的恒斬波驅(qū)動(dòng),、PWM驅(qū)動(dòng)、微步驅(qū)動(dòng),、超微步驅(qū)動(dòng)和混合伺服技術(shù),,使得步進(jìn)電動(dòng)機(jī)的高、低頻特性得到了很大的提高,,特別是隨著智能超微步驅(qū)動(dòng)技術(shù)的發(fā)展,,將把步進(jìn)伺服的性能提高到一個(gè)新的水平。
步進(jìn)伺服是一種用脈沖信號(hào)進(jìn)行控制,,并將脈沖信號(hào)轉(zhuǎn)換成相應(yīng)的角位移的控制系統(tǒng),。其角位移與脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比,,通過(guò)改變脈沖頻率可調(diào)節(jié)電動(dòng)機(jī)的轉(zhuǎn)速,。如果停機(jī)后某些繞組仍保持通電狀態(tài),則系統(tǒng)還具有自鎖能力,。步進(jìn)電動(dòng)機(jī)每轉(zhuǎn)一周都有固定的步數(shù),,如500步、1000步,、50 000步等等,,從理論上講其步距誤差不會(huì)累計(jì)。