何時(shí)使用行星減速機(jī)或伺服電機(jī),?行星減速機(jī)與伺服電機(jī)區(qū)別及應(yīng)用解析!
行星減速機(jī)和伺服電機(jī)是工業(yè)領(lǐng)域中的兩種重要機(jī)械裝置,,它們?cè)趯?shí)現(xiàn)機(jī)械傳動(dòng)和運(yùn)動(dòng)控制方面都扮演著關(guān)鍵的角色,。雖然它們的功能有一定的重疊,但行星減速機(jī)和伺服電機(jī)之間存在著顯著的區(qū)別,。在本文中,,我們將詳細(xì)討論這兩者之間的差異以及它們?cè)诓煌瑧?yīng)用領(lǐng)域中的角色。
行星減速機(jī):傳動(dòng)裝置的精密工匠
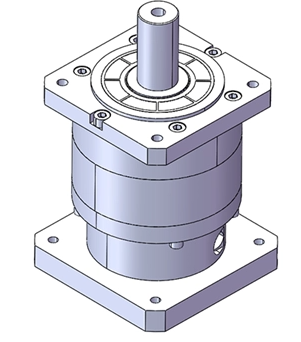
首先,,讓我們深入了解行星減速機(jī),。行星減速機(jī)是一種傳動(dòng)裝置,其主要任務(wù)是將高速輸入旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換為低速輸出旋轉(zhuǎn)運(yùn)動(dòng),,同時(shí)增加輸出軸的扭矩,。它的核心組成部分包括行星齒輪副,、太陽(yáng)輪,、外齒輪等。行星齒輪副通常由多個(gè)行星齒輪組成,,這些齒輪繞著太陽(yáng)輪旋轉(zhuǎn),,從而實(shí)現(xiàn)減速效果。行星減速機(jī)具有高傳動(dòng)效率,、緊湊的體積,、高扭矩輸出和長(zhǎng)壽命等優(yōu)點(diǎn)。

這種類型的減速機(jī)廣泛應(yīng)用于需要高扭矩輸出、低速旋轉(zhuǎn)和長(zhǎng)時(shí)間運(yùn)行的場(chǎng)合,。典型的應(yīng)用領(lǐng)域包括工業(yè)機(jī)械設(shè)備,、自動(dòng)化生產(chǎn)線、輸送帶系統(tǒng)等。其主要特點(diǎn)包括傳動(dòng)平穩(wěn)可靠,,反向間隙微小,,適用于對(duì)傳動(dòng)精度要求較高的應(yīng)用。
伺服電機(jī):精確控制的引擎
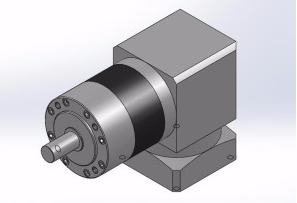
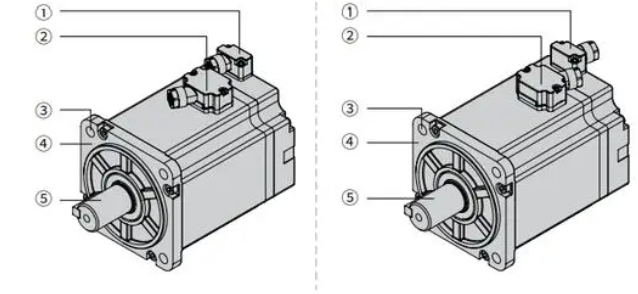
與行星減速機(jī)不同,,伺服電機(jī)是一種可以通過(guò)控制信號(hào)來(lái)實(shí)現(xiàn)精確轉(zhuǎn)速和位置控制的電機(jī),。它配備了反饋裝置,通常是編碼器,,可以實(shí)時(shí)監(jiān)測(cè)電機(jī)的位置和速度,,并根據(jù)需要進(jìn)行調(diào)整。伺服電機(jī)由電機(jī)本體,、編碼器和控制器組成,。
伺服電機(jī)在需要高精度位置控制的場(chǎng)合中發(fā)揮著關(guān)鍵作用。典型的應(yīng)用領(lǐng)域包括數(shù)控機(jī)床,、機(jī)器人技術(shù),、醫(yī)療設(shè)備等。伺服電機(jī)的主要特點(diǎn)包括快速響應(yīng),、高精度定位,、運(yùn)動(dòng)平穩(wěn)等。它能夠根據(jù)控制信號(hào)實(shí)現(xiàn)精確的轉(zhuǎn)速和位置控制,,對(duì)于需要高度精確性和快速響應(yīng)的應(yīng)用非常合適,。
結(jié)構(gòu)上的區(qū)別
從結(jié)構(gòu)上來(lái)看,行星減速機(jī)和伺服電機(jī)也存在一些顯著的區(qū)別,。行星減速機(jī)主要由多個(gè)行星齒輪副組成,,可以根據(jù)需求實(shí)現(xiàn)不同的減速比。它以減速為主,,以增加扭矩輸出為輔,。而伺服電機(jī)主要由電機(jī)本體和編碼器組成,編碼器負(fù)責(zé)實(shí)時(shí)反饋電機(jī)的位置和速度,,從而實(shí)現(xiàn)精確的控制,。
應(yīng)用領(lǐng)域的差異
行星減速機(jī)和伺服電機(jī)在應(yīng)用領(lǐng)域上也有所不同。行星減速機(jī)主要用于那些對(duì)工作扭矩和傳動(dòng)精度要求較高的場(chǎng)合,。例如,,在工業(yè)機(jī)械設(shè)備中,需要將高速電機(jī)輸出的旋轉(zhuǎn)運(yùn)動(dòng)降低速并增加扭矩以滿足工作要求時(shí),,行星減速機(jī)是理想的選擇,。
相比之下,伺服電機(jī)在需要高精度位置控制和運(yùn)動(dòng)平穩(wěn)性的應(yīng)用領(lǐng)域中更為常見,。例如,,在數(shù)控機(jī)床上,,需要將工件進(jìn)行高精度的切削和加工,伺服電機(jī)可以精確地控制工具的位置和速度,,從而實(shí)現(xiàn)高質(zhì)量的加工,。
控制方式的不同
最后,行星減速機(jī)和伺服電機(jī)在控制方式上也存在差異,。行星減速機(jī)通常由標(biāo)準(zhǔn)電機(jī)驅(qū)動(dòng),,其控制方式相對(duì)簡(jiǎn)單。這種類型的減速機(jī)通常不具備自主的反饋和控制功能,。
而伺服電機(jī)需要配備專門的伺服控制器,,以便通過(guò)反饋裝置(通常是編碼器)實(shí)時(shí)監(jiān)測(cè)和調(diào)整電機(jī)的位置和速度。伺服控制器會(huì)不斷與電機(jī)通信,,以確保其滿足控制信號(hào)的需求,。這種控制方式更為復(fù)雜,但也更為精確和靈活,。
總結(jié)
綜上所述,,行星減速機(jī)和伺服電機(jī)在結(jié)構(gòu)、工作原理和應(yīng)用領(lǐng)域上存在顯著的區(qū)別,。行星減速機(jī)主要用于滿足高扭矩和傳動(dòng)精度需求的場(chǎng)合,,而伺服電機(jī)則在需要高精度位置控制和快速響應(yīng)的應(yīng)用中大顯身手。