如何正確使用增量型編碼器,?增量型編碼器的應(yīng)用與優(yōu)勢,!
增量型編碼器是廣泛用于工業(yè)控制和測量應(yīng)用的關(guān)鍵傳感器之一,。它能夠?qū)C械運動轉(zhuǎn)換為數(shù)字信號,,提供有關(guān)位置和速度的關(guān)鍵信息。本文將深入探討增量型編碼器的工作原理,,以及在選擇和使用時需要注意的事項,。
增量型編碼器的工作原理
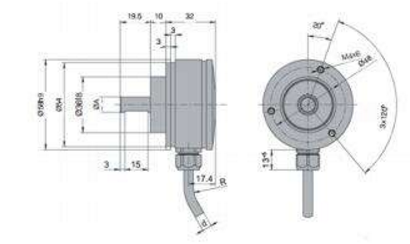
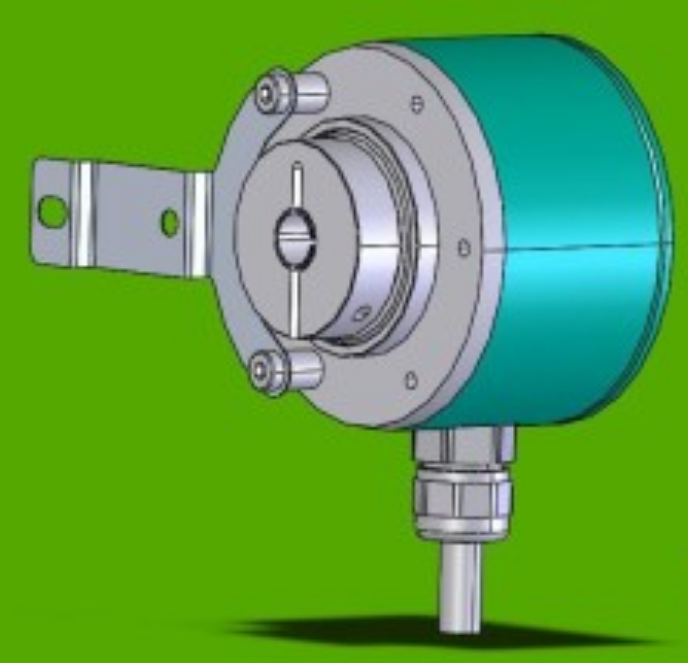
增量型編碼器的工作原理基于光學(xué)信號轉(zhuǎn)換。它由一個旋轉(zhuǎn)的碼盤和一個固定的感光元件組成,。碼盤上刻有許多線,,這些線通過光源照射到感光元件上,當碼盤旋轉(zhuǎn)時,,光線被遮擋,,感光元件會生成電信號。這些電信號經(jīng)過電路處理后,,產(chǎn)生脈沖信號,。

通常,,增量型編碼器提供兩路具有90度相位差的方波信號,分別稱為A和B通道,。這兩個通道的相位差決定了測量間距,。此外,編碼器還可以提供零位信號,,通常稱為Z通道,用于標識位置的零點,。
在實際應(yīng)用中,,A和B通道的信號用于確定旋轉(zhuǎn)方向和測量角度或位置的變化。通過對這兩個信號進行相位差分析,,可以判斷是順時針旋轉(zhuǎn)還是逆時針旋轉(zhuǎn),,并計算出角度或位置的變化。
增量型編碼器的使用注意事項
選型依據(jù)分辨率:增量型編碼器的分辨率取決于碼盤上線的數(shù)量,。更多的線意味著更高的分辨率,。在選擇編碼器時,要根據(jù)具體應(yīng)用的需求來決定分辨率,,以確保獲得足夠精確的位置或速度信息,。
信號處理:編碼器通常輸出TTL電平的信號,其中A脈沖在前,,B脈沖在后,,相位差為90度。在使用前,要仔細閱讀編碼器的產(chǎn)品說明,,以了解信號的正確連接和處理方式,。
數(shù)據(jù)采集:根據(jù)您的控制系統(tǒng),選擇適當?shù)臄?shù)據(jù)采集方法,。對于PLC,,可以選擇高速計數(shù)模塊;對于工控機,,可以使用高速計數(shù)板卡,;對于單片機,建議使用帶有光電耦合器的輸入端口,,以確保數(shù)據(jù)采集的準確性和穩(wěn)定性,。
信號設(shè)置:建議使用B通道信號作為順向(前向)脈沖,A通道信號作為逆向(后向)脈沖,,Z通道信號用于零位標定,。這有助于正確識別旋轉(zhuǎn)方向和確保位置測量的準確性。
安裝和調(diào)試:在安裝增量型編碼器時,,要確保安裝場地干凈,,并特別注意電路連接的質(zhì)量。正確安裝后,,需要進行調(diào)試,,以防在實際操作中影響數(shù)據(jù)處理。
總之,,增量型編碼器是工業(yè)自動化和機械控制系統(tǒng)中不可或缺的傳感器之一,。了解其工作原理和使用注意事項可以幫助您更好地選擇和應(yīng)用增量型編碼器,確保系統(tǒng)的穩(wěn)定性和性能,。無論是在生產(chǎn)線上還是在機器人控制中,,增量型編碼器都扮演著關(guān)鍵的角色,幫助實現(xiàn)精準的位置和速度控制,。