旋轉(zhuǎn)編碼器要怎么測量速度和角度?使用旋轉(zhuǎn)編碼器注意事項,!
在現(xiàn)代工業(yè)中,,許多機械設(shè)備的運轉(zhuǎn)速度和角度都需要精確測量,以確保工作的穩(wěn)定性和精準性,。為了實現(xiàn)這一目標,,通常會使用旋轉(zhuǎn)編碼器,尤其是增量型編碼器,。本文將介紹如何使用旋轉(zhuǎn)編碼器來測量轉(zhuǎn)軸的速度和角度,,以及在軟件編程中的具體思路。

一、安裝和連接編碼器
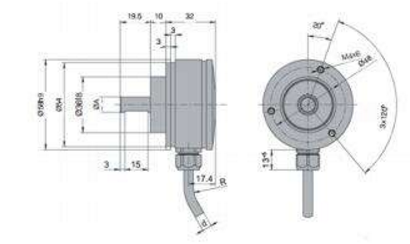
首先,,我們需要在被測轉(zhuǎn)軸上安裝一個合適的旋轉(zhuǎn)編碼器,。通常情況下,選擇增量型編碼器,,并使用A相和B相輸出來測量正負旋轉(zhuǎn),。而要測量角位置,則最好使用帶有Z相輸出的編碼器,。
安裝好編碼器后,,我們需要將其輸出端連接到測量控制器??刂破骺梢允菃纹瑱C,、DSP、擴展單元,、CNC加工卡或伺服驅(qū)動器等,,根據(jù)不同的接口電路選擇相應(yīng)的編碼器輸出類型,如集電極開路輸出或差分輸出,。
二,、編寫軟件程序
在連接測量控制器后,我們需要編寫相應(yīng)的軟件程序,,以便正確讀取和解析編碼器輸出,,并計算出速度和角度。
速度測量
對于速度測量,,我們可以使用PLC(可編程邏輯控制器)來實現(xiàn),。下面是使用三菱PLC測量速度的思路:
第一步:在一個指定的時間間隔內(nèi),,將輸入脈沖的數(shù)量計數(shù)到一個特定的寄存器(假設(shè)為D0)。
第二步:計算速度N=60,000/(N*t),,其中N表示編碼器每轉(zhuǎn)輸出脈沖的數(shù)量,,t表示指定的測量時間(毫秒)。
在這種方法中,,測量精度和編碼器分辨率與測量時間寬度成反比,。換句話說,測量時間越長,,精度越高,,但是對于較高的轉(zhuǎn)速(超過200轉(zhuǎn)/分鐘),可能會出現(xiàn)5轉(zhuǎn)/分鐘以下的誤差,。
角度測量
如果要測量角度位置,,我們可以簡單地累加編碼器的Z相脈沖數(shù)量與A相或B相計數(shù)脈沖的數(shù)量。這樣我們就可以得到當前位置在整個圓中的位置,,以及它相對于起始點的角度,。
三、注意事項
使用旋轉(zhuǎn)編碼器測量速度和角度時,,有一些需要注意的事項:
脈沖速度限制:控制器應(yīng)該在最高速度下可接受的脈沖速度范圍內(nèi)操作,,否則測量結(jié)果可能會出現(xiàn)不準確。
編碼器分辨率:選擇合適的編碼器分辨率,,以滿足測量的要求,。較高的分辨率可以提供更高的精度,但也需要更多的計算資源,。
測量時間:合理選擇測量時間,,以平衡測量精度和實時性。較短的測量時間可以提供實時的測量結(jié)果,,但可能犧牲一定的精度,。
環(huán)境干擾:在使用編碼器時,應(yīng)注意避免環(huán)境中可能導(dǎo)致測量干擾的因素,,例如電磁干擾,、震動等。
總結(jié)起來,,使用旋轉(zhuǎn)編碼器測量速度和角度是工業(yè)領(lǐng)域中常見的任務(wù),。通過選擇適當?shù)木幋a器類型和合理編寫軟件程序,我們可以實現(xiàn)高精度的測量結(jié)果,。同時,我們需要注意控制器的脈沖速度限制和環(huán)境干擾,,以確保測量的準確性和可靠性,。在實際應(yīng)用中,,根據(jù)具體情況進行優(yōu)化和調(diào)整,以滿足不同工業(yè)設(shè)備的要求,。