如何計算絕對值編碼器的分辨率,?絕對值編碼器在推焦車中的應(yīng)用介紹!
分辨率是決定編碼器性能的最重要參數(shù)之一,。分辨率是指編碼器的每個計數(shù)單位之間產(chǎn)生的距離,,即編碼器可以測量的最小距離。此參數(shù)表示編碼器可以計算的最小波角偏移,。在旋轉(zhuǎn)編碼器中,,該值通常由每轉(zhuǎn)的脈沖數(shù)決定,而在線性旋轉(zhuǎn)編碼器中則由兩個相鄰標(biāo)記之間的距離決定,。有不同類型的編碼器,,具有不同的用途。

絕對值編碼器分辨率怎么計算呢?
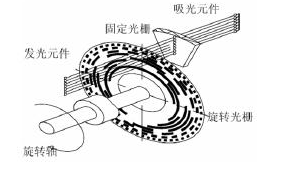
絕對值編碼器對每個位置都有獨特的軌跡,,并測量特定的位置和位移,。絕對值編碼器盤被劃分為不同的扇區(qū)。每個扇區(qū)使用二進(jìn)制或格雷碼來保存有關(guān)其在代碼盤中位置的加密信息,。因此,,絕對值編碼器不發(fā)送脈沖,而是發(fā)送關(guān)于當(dāng)前角軸位置的編碼信息,。
因此,,絕對值編碼器的分辨率不是以脈沖為單位來測量的,而是以每一個完整的磁盤旋轉(zhuǎn)的比特或代碼為單位,。代碼磁盤的扇區(qū)越多,,分辨率就越高。
然而,,絕對值編碼器的分辨率通常是以比特為單位確定的,。正如你所看到的,絕對值編碼器都是關(guān)于數(shù)據(jù)傳輸?shù)?。傳輸?shù)男畔⒘扛菀滓员忍赜嬎恪?br>
因此,,絕對值編碼器的分辨率由每個周期的比特數(shù)決定。絕對值編碼器的分辨率類似于線性絕對值編碼器的工作原理,。編碼的位置信息被定位在它們的尺度上并且以比特為單位進(jìn)行測量,。
多圈絕對值編碼器的分辨率
有時您可以在規(guī)范中看到兩個分辨率值。在這種情況下,,您有一個多環(huán)路設(shè)備,。有兩種主要類型的絕對值編碼器:單圈(ST)和多圈(MT)
多圈絕對值編碼器的分辨率
單圈旋轉(zhuǎn)的分辨率由旋轉(zhuǎn)過程中的位數(shù)決定,。
多圈旋轉(zhuǎn)分辨率由比特數(shù)確定,并且存儲關(guān)于已經(jīng)進(jìn)行的圈數(shù)的信息,。在這種情況下,,系統(tǒng)會收集有關(guān)曲線數(shù)量的數(shù)據(jù)。多臺車床總是在轉(zhuǎn)動,。
如何將編碼器的位數(shù)轉(zhuǎn)換為ppr,?
在大多數(shù)情況下,絕對值編碼器的分辨率是以位為單位的,。要將位數(shù)快速轉(zhuǎn)換為更易于理解的值(每轉(zhuǎn)脈沖或行數(shù)),,請將數(shù)字2增加到等于位數(shù)的冪。例如,,您有12位數(shù)字,,等于212(4096 PPR)。此公式用于單圈和多圈分辨率,。
因此,,如果您有14位單圈分辨率和16位多圈分辨率,則等于214(16.384人/連續(xù)生產(chǎn)/專業(yè)進(jìn)步)和216(65.536可能的轉(zhuǎn)數(shù)),。
絕對值編碼器在推焦車中的應(yīng)用
本文通過實際技術(shù)應(yīng)用,,從裝置原理、選型,、技術(shù)調(diào)試應(yīng)用等多方面論述了絕對值編碼器在焦?fàn)t推焦車推焦桿行程和速度控制中的應(yīng)用,。首先,從技術(shù)和安全的角度解釋了工廠設(shè)計中考慮的各種因素,,最后,,通過比較增量編碼器和絕對值編碼器的原理和特性,確定了選擇絕對值編碼器的原因,。隨后,,通過作者的個人工程實例,詳細(xì)介紹了一種特定的絕對值編碼器的應(yīng)用,,包括硬件配置,、軟件編寫和使用注意事項。還解釋了使用的一些細(xì)節(jié),。對絕對值編碼器在焦?fàn)t推焦車中的應(yīng)用進(jìn)行了廣泛的闡述,。
7.63米焦?fàn)t是一種大型、自動化程度高的現(xiàn)代化環(huán)保焦?fàn)t,。移動式焦?fàn)t機(jī)采用先進(jìn)技術(shù),,自動化水平高,爐號自動檢測,單點定位停車,,定位精度+5mm,。在7.63米焦?fàn)t的四輛大型車中,推焦機(jī)體積最大,,控制最復(fù)雜,,控制精度最高。其主要功能是通過推桿將成熟焦炭推出炭化室,,并按照2-1中間工藝,用扁煤棒將裝入裝煤車的煤壓扁,。完成這兩項任務(wù)的焦化棒和碳棒及其控制系統(tǒng)已成為焦化棒中最重要的兩個設(shè)備系統(tǒng),。它們的驅(qū)動由變頻器牽引電機(jī)完成,行程的位置檢測和精度控制由編碼器水實現(xiàn),。本文簡要討論了編碼器的器件選擇和實際技術(shù)應(yīng)用,。
設(shè)備選擇
在工業(yè)控制的定位系統(tǒng)中使用接近開關(guān)和光開關(guān)已經(jīng)很成熟,并且在某些條件下易于操作,。然而,,控制焦炭推桿和煤杯并不是一個容易的位置控制,而且在整個行程中有更復(fù)雜的算法,,根據(jù)駕駛要求有不同的速度,。同時,高溫的現(xiàn)場環(huán)境使一般接近開關(guān)安裝位置無法保證可靠使用,,增加了系統(tǒng)硬件組成和布線的復(fù)雜性,。日常維護(hù)工作也將增加,但可靠性遠(yuǎn)遠(yuǎn)不能滿足要求,。編碼器的特點是,,除了定位之外,它還可以知道具體位置,,轉(zhuǎn)換移動速度,,并與變頻器合作,非常方便地控制它,。只需一個編碼器就可以同時解決多個控制位置,,并且完全可以安裝在安全的地方。解決了接近開關(guān)設(shè)備現(xiàn)場安裝,、易受應(yīng)力損壞,、受安裝環(huán)境限制等問題。它在日常維護(hù),、使用和降低運營成本方面具有優(yōu)勢,。因此,在工程實踐中選擇編碼器作為位置檢測裝置。
為什么選擇絕對值編碼器而不是相對便宜的增量編碼器,?這是由考慮到工藝和安全因素的絕對值編碼器和增量編碼器的操作特性決定的,。增量編碼器(旋轉(zhuǎn)式)由一個中心軸刻有圓形和暗線的光電編碼器盤組成,通過光電發(fā)射和接收將其轉(zhuǎn)換為電脈沖信號輸出,。計數(shù)器對脈沖信號進(jìn)行處理以獲得相應(yīng)的位置信息,。其優(yōu)點是基本結(jié)構(gòu)簡單,抗干擾能力強(qiáng),。缺點是無法輸出輪轂的絕對位置,,并且在電源關(guān)閉后位置信息丟失。通常情況下,,在停電前位置信息無法保持,。絕對值編碼器與增量編碼器的不同之處在于,它們可以直接輸出數(shù)字量的編碼值,。在圓形代碼盤上,,有透明和不透明的扇區(qū),它們形成了幾個同心的代碼通道,。如果碼盤處于不同的位置,,則產(chǎn)生相應(yīng)的電平信號以形成二進(jìn)制碼并輸出絕對位置信號。絕對值編碼器的特性是它不需要計數(shù)器,,并且可以讀?。ɑ蜣D(zhuǎn)換)軸上任何位置的絕對行程位置值。更重要的是,,絕對值編碼器在電流斷開后不會丟失其位置信息,,并且可以在斷電前保持位置信息。
從技術(shù)和安全的角度來看,,如果電源因任何原因突然中斷,,增量編碼器的使用將不可避免地停止工作,并且在重新通電后,,有必要校準(zhǔn)或分配相對計數(shù)零位置,。在焦炭棒或扁煤棒的工作過程中,這是絕對不允許的,,因為在1000攝氏度左右的炭化室中,,如果焦炭棒和扁煤棒由于故障而在炭化室中多停留一分鐘,這是非常危險的,。隨著時間的推移,,由于壓焦棒和煤棒的高溫變形,可能會造成設(shè)備損壞,,甚至更嚴(yán)重的事故,。因此,有必要了解恢復(fù)供電后焦炭推桿和煤柱的實際位置,以便控制系統(tǒng)能夠根據(jù)實際位置進(jìn)行安全控制,。當(dāng)然,,通過程序控制和其他手段,可以保持當(dāng)前錯誤的位置信息,,或者在錯誤的情況下使用替代值來進(jìn)行特殊處理和控制,,但可靠性,尤其是安全性降低了,。因此,,選擇絕對值編碼器作為焦炭推桿和輸煤桿的位置信號檢測裝置。