

電路中如何消除絕對值編碼器電壓變化,?絕對式編碼器機械安裝使用介紹,!
消除絕對值編碼器電壓變化,,該設計預計會產(chǎn)生的問題將會是產(chǎn)生偏差:3%的誤差可能導致電壓在3V至4.5V之間變化,。增量型編碼器每一個位置對應一個確定的數(shù)字碼,因此它的示值只與測量的起始和終止位置有關(guān),,而與測量的中間過程無關(guān),。可進行基本計算,。數(shù)字絕對值編碼器是50kΩ (25%容差),,R1為16.5K ,R2為100K ,。絕對值編碼器端到端電阻25%的容差是設計中的最大誤差源,。
現(xiàn)在考慮用不同的抽頭電阻進行相同計算,如果絕對值編碼器是37.5k&Omega,;頂端電壓為4.46V,,低端為3.25V;如果絕對值編碼器為62.5kΩ則頂端電壓為4.54V,,低端電壓為2.79V.此電路中,,由于絕對值編碼器端到端阻值偏差較大,不能采用這種基本架構(gòu)解決電壓變化問題,。拉線位編碼器是將信號或數(shù)據(jù)編制轉(zhuǎn)換為可用以通訊,、傳輸和存儲形式的設備,把角位移或直線位移轉(zhuǎn)換成電信號,,前者稱為碼盤,,后者稱為碼尺。編碼器的信號輸出包括正弦波,、方波,、集電極開路、推拉式等多種形式。
電路中引入兩個電壓基準,,使偏差和溫度系數(shù)得到控制,,數(shù)字絕對值編碼器的端到端絕對偏差會改變回路電流,但不影響電壓,。輸出電壓按比例變化,,只取決于絕對值編碼器抽頭位置的電阻比。
兩個基準都通過反饋控制輸出電壓,,R2 確定兩個基準的源出電流,。二進制編碼器它可以表示兩種狀態(tài),即開和關(guān),。這種狀態(tài)可以由電位的高低來實現(xiàn),。計算機是由各種電子元器件組成的。其中有一種重要的元件就是半導體即我們熟悉的二極管,、三極管等,。半導體可以通過它的開關(guān)狀態(tài)來傳遞和處理信息。如果用其它的進制必將使計算機的制造和信息的處理更為復雜,。所以輸入電腦的任何信息最終都要轉(zhuǎn)化為二進制,。目前通用的是ASCII碼。最基本的單位為一bit,。
通過如上在電路中消除絕對值編碼器電壓變化的方法的講解,,大家是否有所了解呢
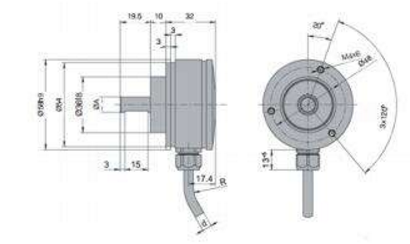
絕對式編碼器機械安裝使用說明
絕對型旋轉(zhuǎn)編碼器的機械安裝有高速端安裝、低速端安裝,、輔助機械裝置安裝等多種形式,。
高速端安裝:安裝于動力馬達轉(zhuǎn)軸端(或齒輪連接),此方法優(yōu)點是分辨率高,,由于多圈編碼器有4096圈,,馬達轉(zhuǎn)動圈數(shù)在此量程范圍內(nèi),可充分用足量程而提高分辨率,,缺點是運動物體通過減速齒輪后,,來回程有齒輪間隙誤差,一般用于單向高精度控制定位,,例如軋鋼的輥縫控制,。另外編碼器直接安裝于高速端,馬達抖動須較小,,不然易損壞編碼器,。
低速端安裝:安裝于減速齒輪后,如卷揚鋼絲繩卷筒的軸端或最后一節(jié)減速齒輪軸端,,此方法已無齒輪來回程間隙,,測量較直接,,精度較高,此方法一般測量長距離定位,,例如各種提升設備,,送料小車定位等。
輔助機械安裝:
常用的有齒輪齒條,、鏈條皮帶,、摩擦轉(zhuǎn)輪、收繩機械等,。






