應(yīng)用獨特的3通道RS-485收發(fā)器,,顯示許多不尋常的功能,可提高電機(jī)控制應(yīng)用中的可靠性和故障檢測,。MAX3097和MAX3098專為電機(jī)軸編碼器應(yīng)用而設(shè)計,,具有三個差分通道,,用于處理光學(xué)編碼器數(shù)據(jù),,±15kV ESD保護(hù),,共模抑制增強(qiáng)至-10和+13.2V,,三個獨立的故障報警標(biāo)志,,以及故障安全開路和短路檢測,。報警標(biāo)志指示線路開路或短路情況、共模電壓范圍過大以及信號強(qiáng)度低,。
現(xiàn)代工廠使用大型電動機(jī)來控制工廠運(yùn)行所需的機(jī)器,。為了提高靈活性和準(zhǔn)確性,這些電動機(jī)有時由處理器控制,??刂七@些大型電機(jī)的電子設(shè)備必須設(shè)計成這樣一種方式,即如果出現(xiàn)問題,,電機(jī)將安全快速地關(guān)閉,。未能檢測到問題并充分控制電機(jī)可能會導(dǎo)致昂貴的設(shè)備損壞,以及受傷甚至死亡,。MAX3097E/MAX3098E專門設(shè)計用于絕對定位控制環(huán)路中的電機(jī),。這些部件具有獨特的功能,可在惡劣的工業(yè)環(huán)境中實現(xiàn)更安全,、更堅固的設(shè)計,。為了更好地理解MAX3097E/MAX3098E的獨特特性,,我們首先回顧一下電機(jī)控制的基礎(chǔ)知識。
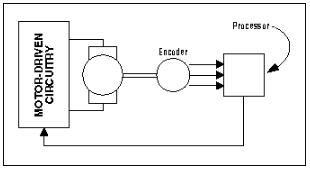
圖1.處理器控制的電動機(jī)的主要構(gòu)建模塊,。
圖 1 中的模塊包括處理器,、電機(jī)驅(qū)動電路、電動機(jī)和編碼器,。處理器決定電機(jī)的驅(qū)動力度和驅(qū)動位置,。電機(jī)驅(qū)動電路包電力電子含驅(qū)動電機(jī)所需的所有設(shè)備,編碼器向處理器提供位置,、方向和速度信息,,從而閉環(huán),。要了解MAX3097E/MAX3098E的工作原理,,必須很好地掌握編碼器的工作原理。
編碼器操作
編碼器的功能是向處理器提供速度,、方向和位置信息,。電機(jī)編碼器可以采用許多不同的形式,。MAX3097E/MAX3098E設(shè)計用于三路輸出編碼器工作,,該編碼器通常采用光學(xué)結(jié)構(gòu)。光學(xué)編碼器的工作原理是通過輪子或標(biāo)記的圓盤照射光線,,該圓盤隨電機(jī)轉(zhuǎn)動,。根據(jù)應(yīng)用和所需的精度,,編碼器的邊緣周圍有不同數(shù)量的槽/標(biāo)記。此外,,位于下面的另一個插槽用于索引,。兩個光學(xué)傳感器的位置使得在主插槽上提供正交信息。最終結(jié)果是三個數(shù)字輸出,,通常稱為 A,、B 和 Z。參見圖2,。
圖2.光學(xué)編碼器盤,。
速度
編碼器輪通常每轉(zhuǎn)一圈電機(jī),或者處于齒輪比,。因此,,來自A和B輸出的數(shù)字信號的頻率與電機(jī)的速度成比例變化。例如,,將 1000 線編碼器直接耦合到以 5000RPM 旋轉(zhuǎn)的電機(jī),,產(chǎn)生 83kHz 的頻率。因此,,通過測量 A 或 B 輸出的頻率,,處理器可以確定電機(jī)的速度,。
方向
方向可以通過測量A和B輸出之間的相位差來確定。在圖 2 中,,如果 A 在 B 之前上升,,則電機(jī)沿一個方向轉(zhuǎn)動,或者如果 B 在 A 之前上升,,則電機(jī)向另一個方向轉(zhuǎn)動,。
位置
索引脈沖可用作電機(jī)旋轉(zhuǎn)位置的參考點。一旦知道索引脈沖的位置,,就可以對A和B輸出進(jìn)行計數(shù),,以更準(zhǔn)確地確定位置。使用100槽光學(xué)編碼器,,電機(jī)軸的位置可以解析到4度以下,。
使電子設(shè)備遠(yuǎn)程化
MAX3097E/MAX3098E如何適應(yīng)圖片?這個拼圖還缺少一塊,。在典型的工業(yè)設(shè)置中,,通常需要將所有控制電子設(shè)備放在一個中心點,以簡化維護(hù)和接線問題,。以傳送帶系統(tǒng)為例,,傳送帶可以長達(dá)數(shù)百英尺,但控制電子設(shè)備通常位于機(jī)柜本地,。這給設(shè)計人員帶來了一個問題,,因為使用這些系統(tǒng)的環(huán)境通常是電子噪聲的。為了降低噪聲,,設(shè)計人員通常采用通過RS-485器件傳輸三編碼器信號的方法(在本文中,,RS-422和RS-485可以互換使用)。RS-485是天然的,,因為它對噪音具有很高的抗擾度和長距離行駛的能力,。在典型應(yīng)用中,使用四通道驅(qū)動器和接收器:26LS32和26LS31或類似器件,,如圖3所示,。
圖3.電機(jī)編碼器的典型遠(yuǎn)程安裝。
該解決方案比不使用RS-485驅(qū)動器的系統(tǒng)更強(qiáng)大,。但是,,長線路存在問題,MAX3097E/MAX3098E專門設(shè)計用于解決,,在26LS31和26LS32型器件上,,可通過以下方式改進(jìn):
高靜電保護(hù)
更好的共模抑制
故障識別
高靜電保護(hù)
所有器件均具有ESD保護(hù),但MAX3097E/MAX3098E的保護(hù)電平遠(yuǎn)高于典型值:使用人體模型時為15kV。這意味著ESD事件導(dǎo)致錯誤的可能性較小,,從而導(dǎo)致電機(jī)控制器停止正常工作,。ESD結(jié)構(gòu)的詳細(xì)說明超出了本文的范圍,但更多信息可以從應(yīng)用筆記651“I/O端口的ESD保護(hù)”中獲得,。
更好的共模抑制
使用電機(jī)編碼器的環(huán)境通常電氣噪聲很大,。系統(tǒng)內(nèi)各種接地之間可能會出現(xiàn)共模差異。典型的RS-485器件具有-7V至+ 12V的共模抑制范圍,。在MAX3097E/MAX3098E中,,Maxim將這一范圍從-10V擴(kuò)展至+13.2V。
故障識別
雖然上述優(yōu)點很有幫助,,但MAX3097E/MAX3098E的真正功率在于能夠識別和指示電機(jī)控制器μP的故障,。 查看圖 4,請注意有五個引腳,,分別標(biāo)記為 AlarmA,、AlarmB、AlarmZ,、AlarmD 和 Delay,。這些引腳是MAX3097E/MAX3098E獨有的,,為電機(jī)控制器提供發(fā)生物理線路錯誤的信息,。一旦電機(jī)控制器確定發(fā)生了錯誤,就可以采取適當(dāng)?shù)拇胧﹣泶_保系統(tǒng)有序安全地關(guān)閉,。
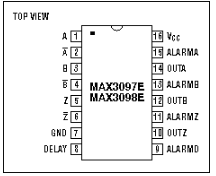
圖4.MAX3097引腳排列
AlarmA,、AlarmB 和 AlarmZ 的功能相同,但指示各自導(dǎo)線上的故障,。故障D輸出是三個信號的OR,。此外,它還內(nèi)置了可編程延遲,。此輸出應(yīng)用于全局警報,。延遲是為了在信號相互交叉時阻止故障檢測器的錯誤觸發(fā)。下面描述可以檢測的錯誤以及如何使用MAX3097E/MAX3098E來確定發(fā)生了哪些錯誤,。
檢測過大的共模范圍
如前所述,,MAX3097E/MAX3098E的共模范圍為-10V至+13.2V。雖然這明顯優(yōu)于典型RS-485器件的共模范圍(-7V至+ 12V),,但仍有可能超出此范圍,。如果超出典型RS-485接收器的共模輸入范圍,則不能依賴它提供正確的輸出狀態(tài),。MAX3097E/MAX3098E也是如此,,但相關(guān)的報警引腳輸出將被驅(qū)動為高電平,向處理器表明數(shù)據(jù)不可靠。參見圖 5,。
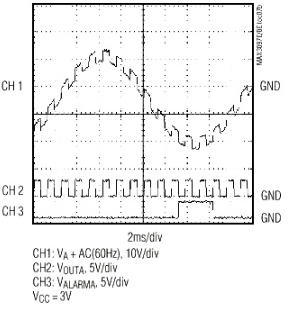
圖5.這顯示了通道A上由于共模范圍過大而導(dǎo)致的故障報警;該故障表示此時間段內(nèi)的數(shù)據(jù)可能不可靠,。
檢測開路輸入線
對于任何電纜,電線都可能從連接器中脫落,、連接器斷裂以及電纜無意中被切斷,。
通常,接收器連接包含一個終端電阻來抑制反射,,如圖6所示,。通常的值是100Ω或120Ω,具體取決于所用連接電纜的阻抗,。
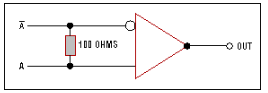
圖6.接收器輸入連接,。
圖6顯示了電機(jī)編碼器信號接收器的連接。由于終端電阻的存在,,如果A突然斷開,,則A的電壓電平將被拉向A處的電壓電平。MAX3097E中有一個門限比較器,,如果|,,則使故障輸出跳閘。VA-A|< 400mV,。該技術(shù)允許器件檢測其中一條線路上是否存在開路,。要使這種技術(shù)起作用,必須存在終端電阻,。因此,,終端電阻應(yīng)與接收器放置在同一板上,而不是連接在外部螺絲端子上,,因為端子可能會脫落,。
在正常轉(zhuǎn)換期間,信號 A 和 A 有一個交叉時間,。這將觸發(fā)故障比較器,,如|VA-A|< 400mV。為避免雜散信號,,應(yīng)使用全局故障輸出(故障D),。MAX3097E/MAX3098E在故障D上具有故障消隱功能,確保輸出在故障存在固定時間段之前不會切換(用戶可通過外部電容設(shè)置),。這可確保電機(jī)控制器不會因雜散交越信號而受到不必要的中斷,。
檢測短接在一起的輸入線
使用長導(dǎo)線和接線端子連接,電線很容易短路在一起,。由于RS-485通常通過雙絞線傳輸,,因此差分信號可能會短路在一起,。
這種情況與開路的情況非常相似,因為如果A和A一起短路,,電壓差將小于400mV,,因此故障輸出。
圖7.檢測差分信號之間的短路,。
檢測信號強(qiáng)度差
在從編碼器到控制電子設(shè)備的長距離電纜上,,接收端的信號可能小于RS-485和RS-422規(guī)定的200mV所需差分信號。例如,,可以安裝電纜并|接收的輸入電平VA-A|安裝時可能僅大于200mV,。如果隨著時間的推移,水分進(jìn)入電纜,,電纜的電容會增加,。因此,接收到的輸入|VA-A|將降至200mV門限以下,。在這種情況下,,接收到的數(shù)據(jù)不能保證,MAX3097E/MAX3098E標(biāo)記故障情況,。如圖8所示,,檢測電路在工作。
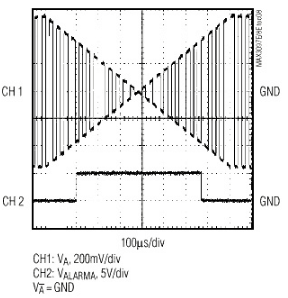
圖8.檢測信號強(qiáng)度差,。
不同的安裝需要安全閾值或允許的最大電線長度,。為了滿足這兩種需求,MAX3097E和MAX3098E的信號強(qiáng)度門限不同,。在MAX3097E中,,低壓差分檢測以0.4V為中心,以確保小于200mV的信號被標(biāo)記為故障,。在MAX3098E中,該故障門限以0.2V為中心,,以確??梢越邮盏阶钚‰娖降男盘枴_@兩個元件之間的選擇取決于是否需要系統(tǒng)設(shè)計發(fā)出預(yù)警(MAX3097E),,或者是否需要實現(xiàn)最大距離(MAX3098E),。