驅(qū)動(dòng)器有哪些核心作用及關(guān)鍵構(gòu)成要素,?伺服驅(qū)動(dòng)器增益參數(shù)的秘訣,!
隨著電子元器件行業(yè)的迅速發(fā)展,驅(qū)動(dòng)器已經(jīng)成為該行業(yè)中的不可或缺的組成部分,。驅(qū)動(dòng)器在控制電子設(shè)備的運(yùn)行中起著關(guān)鍵作用,,其功能是將電源的電流和電壓轉(zhuǎn)換為適合元器件的格式,以實(shí)現(xiàn)元器件的有效工作,。本文將深入介紹驅(qū)動(dòng)器的基本概念,、工作原理、結(jié)構(gòu)組成,、類型及作用,,旨在幫助讀者更好地理解和應(yīng)用驅(qū)動(dòng)器。
一,、驅(qū)動(dòng)器是什么,?
在電子元器件行業(yè)中,驅(qū)動(dòng)器是一種關(guān)鍵元件,,用于控制電子設(shè)備的運(yùn)行,。它能夠?qū)㈦娫吹碾娏骱碗妷哼M(jìn)行有效的轉(zhuǎn)換,以控制設(shè)備的各種功能,,如電機(jī)控制和信號(hào)處理等,。
二,、驅(qū)動(dòng)器的工作原理
驅(qū)動(dòng)器的工作原理是將低電壓輸入的電流轉(zhuǎn)換為高電壓輸出的電流,,這個(gè)轉(zhuǎn)換過程是通過一個(gè)控制電路來實(shí)現(xiàn)的??刂齐娐吠ㄟ^接受輸入電壓來調(diào)節(jié)輸出電壓,,從而實(shí)現(xiàn)高電壓的輸出。此外,,控制電路還可以根據(jù)設(shè)備的類型來控制輸出電壓的變化,,以實(shí)現(xiàn)對(duì)不同類型設(shè)備的控制。
三,、驅(qū)動(dòng)器的結(jié)構(gòu)組成
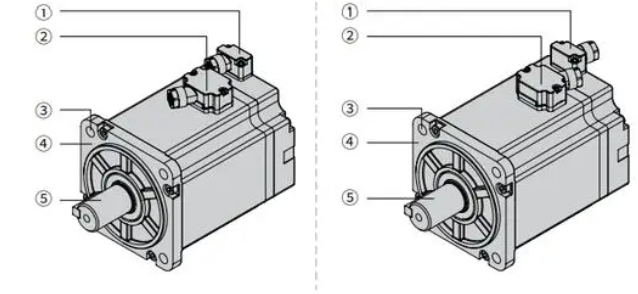
驅(qū)動(dòng)器通常由多個(gè)組件組成,,包括電路板、電源,、電源轉(zhuǎn)換器和控制器,。電路板包含各種電路和電子元件,實(shí)現(xiàn)了電子驅(qū)動(dòng)器的功能,。電源可以是交流電或直流電,,電源轉(zhuǎn)換器將電源能量轉(zhuǎn)換為電子元器件所需的工作能量??刂破鲃t根據(jù)用戶的需求和設(shè)置,,通過控制驅(qū)動(dòng)器的輸出電流、電壓和驅(qū)動(dòng)時(shí)序,,來實(shí)現(xiàn)對(duì)電子元件的控制,。
四、驅(qū)動(dòng)器的類型
驅(qū)動(dòng)器有多種類型,,每種類型都具有不同的用途和結(jié)構(gòu),。常見的驅(qū)動(dòng)器類型包括電機(jī)驅(qū)動(dòng)器、模擬驅(qū)動(dòng)器,、數(shù)字驅(qū)動(dòng)器,、顯示驅(qū)動(dòng)器和存儲(chǔ)器驅(qū)動(dòng)器等。
電機(jī)驅(qū)動(dòng)器:電機(jī)驅(qū)動(dòng)器用于將電能轉(zhuǎn)換為機(jī)械能,,以控制電機(jī)的運(yùn)動(dòng),。它通常由變頻器、伺服驅(qū)動(dòng)器,、繼電器和控制電路組成,。
模擬驅(qū)動(dòng)器:模擬驅(qū)動(dòng)器是一種用于控制信號(hào)的設(shè)備,它能夠?qū)㈦娮有盘?hào)轉(zhuǎn)換為模擬信號(hào),,以控制傳感器,、執(zhí)行器或其他外部設(shè)備,。
數(shù)字驅(qū)動(dòng)器:數(shù)字驅(qū)動(dòng)器是一種能夠?qū)?shù)字信號(hào)轉(zhuǎn)換為特定的電機(jī)控制信號(hào)的設(shè)備,用于控制電機(jī)的運(yùn)動(dòng)和位置,。
顯示驅(qū)動(dòng)器:顯示驅(qū)動(dòng)器是一種將數(shù)據(jù)轉(zhuǎn)換為圖形顯示的設(shè)備,,可以實(shí)現(xiàn)數(shù)據(jù)的圖形化顯示。
存儲(chǔ)器驅(qū)動(dòng)器:存儲(chǔ)器驅(qū)動(dòng)器是一種設(shè)備,,它可以將外部設(shè)備的數(shù)據(jù)存儲(chǔ)在內(nèi)部存儲(chǔ)器中,,以供以后使用。
五,、驅(qū)動(dòng)器的作用
驅(qū)動(dòng)器的主要作用是控制電子元器件的參數(shù),,包括時(shí)間、數(shù)量,、頻率和強(qiáng)度等,。它由一個(gè)內(nèi)部電路板和一個(gè)外殼組成,內(nèi)部電路板通過控制電路來調(diào)節(jié)電子元器件的參數(shù),,外殼則提供保護(hù)和連接電源的功能。驅(qū)動(dòng)器可以根據(jù)不同類型的電子元器件提供不同的參數(shù)控制,,如LED,、激光模塊、傳感器,、接近開關(guān),、電機(jī)和蜂鳴器等。驅(qū)動(dòng)器的作用是確保電子元器件能夠正常工作,,并保護(hù)它們免受損壞,。
隨著技術(shù)的不斷發(fā)展,驅(qū)動(dòng)器正變得更加智能化,、節(jié)能化和可靠,。它們的性能越來越強(qiáng)大,更加靈活,,能夠?yàn)榭蛻籼峁└玫姆?wù),。
伺服驅(qū)動(dòng)器增益參數(shù)的調(diào)整方法
伺服驅(qū)動(dòng)器的性能調(diào)整是確保系統(tǒng)正常運(yùn)行的重要一環(huán)。以下是手動(dòng)調(diào)整增益參數(shù)的方法:
調(diào)整速度比例增益KVP值:首先,,將積分增益KVI和微分增益KVD調(diào)整至零,。然后逐漸增加KVP值,同時(shí)觀察伺服電機(jī)是否出現(xiàn)振蕩現(xiàn)象以及速度是否不穩(wěn)定,。如果出現(xiàn)上述情況,,需要降低KVP值,直到振蕩消失,,速度穩(wěn)定,。這時(shí)的KVP值即為初步確定的參數(shù)值,。
調(diào)整積分增益KVI值:逐漸增加積分增益KVI值,使積分效應(yīng)逐漸顯現(xiàn),。如果KVP值和KVI值的配合導(dǎo)致振蕩,,需要降低KVI值,直到穩(wěn)定,。這時(shí)的KVI值即為初步確定的參數(shù)值,。
調(diào)整微分增益KVD值:微分增益的目標(biāo)是平穩(wěn)速度旋轉(zhuǎn)和減少超調(diào)量。逐漸增加微分增益KVD值,,以改善速度的穩(wěn)定性,。
調(diào)整位置比例增益KPP值:過大的KPP值可能導(dǎo)致伺服電機(jī)在定位時(shí)產(chǎn)生過大的超調(diào)量,引發(fā)不穩(wěn)定現(xiàn)象,。因此,,需要小心地調(diào)整KPP值,降低超調(diào)量,,同時(shí)確保定位效率不會(huì)過低,。
雖然手動(dòng)調(diào)整增益參數(shù)是一種有效的方法,但現(xiàn)代伺服驅(qū)動(dòng)器通常具備自動(dòng)調(diào)整增益參數(shù)的功能,。這些自動(dòng)化工具可以根據(jù)實(shí)際負(fù)載情況進(jìn)行參數(shù)調(diào)整,,更加方便且精確。用戶可以利用自動(dòng)參數(shù)調(diào)整功能,,然后根據(jù)需要進(jìn)行手動(dòng)微調(diào),。
此外,現(xiàn)代伺服驅(qū)動(dòng)器還提供了參數(shù)設(shè)置選項(xiàng),,用戶可以根據(jù)不同的控制響應(yīng)需求將系統(tǒng)劃分為不同級(jí)別,,如高響應(yīng)、中響應(yīng)和低響應(yīng),。這使得伺服系統(tǒng)能夠靈活地適應(yīng)不同的應(yīng)用場(chǎng)景,。
綜上所述,驅(qū)動(dòng)器在電子元器件行業(yè)中扮演著至關(guān)重要的角色,,它們通過控制電流和電壓的轉(zhuǎn)換,,實(shí)現(xiàn)了各種電子設(shè)備的正常運(yùn)行。了解驅(qū)動(dòng)器的基本知識(shí),、工作原理和類型,,以及如何調(diào)整增益參數(shù),對(duì)于電子工程師和技術(shù)人員來說都是至關(guān)重要的,。隨著技術(shù)的不斷發(fā)展,,驅(qū)動(dòng)器將繼續(xù)提供更高效、更智能的控制解決方案,推動(dòng)電子行業(yè)的進(jìn)步,。