直流伺服電機(jī)與交流伺服電機(jī)對(duì)比有哪些優(yōu)缺點(diǎn)?伺服參數(shù)設(shè)置介紹,!
伺服電機(jī)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),,是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)可使控制速度,,位置精度非常準(zhǔn)確,,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號(hào)控制,,并能快速反應(yīng),,在自動(dòng)控制系統(tǒng)中,用作執(zhí)行元件,,且具有機(jī)電時(shí)間常數(shù)小,、線性度高、始動(dòng)電壓等特性,,可把所收到的電信號(hào)轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出,。
直流伺服電機(jī)與交流伺服電機(jī)
分為直流和交流伺服電動(dòng)機(jī)兩大類,,其主要特點(diǎn)是,當(dāng)信號(hào)電壓為零時(shí)無自轉(zhuǎn)現(xiàn)象,,轉(zhuǎn)速隨著轉(zhuǎn)矩的增加而勻速下降,。
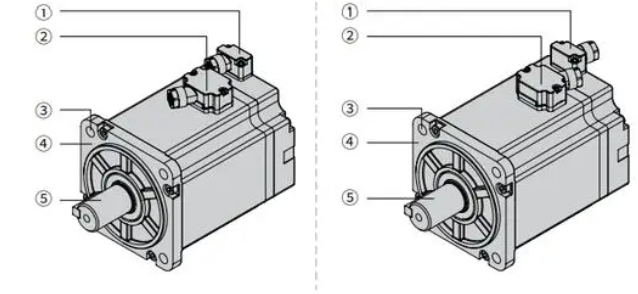
直流伺服電機(jī),它包括定子,、轉(zhuǎn)子鐵芯,、電機(jī)轉(zhuǎn)軸,、伺服電機(jī)繞組換向器、伺服電機(jī)繞組,、測速電機(jī)繞組,、測速電機(jī)換向器,所述的轉(zhuǎn)子鐵芯由矽鋼沖片疊壓固定在電機(jī)轉(zhuǎn)軸上構(gòu)成,。
交流伺服電機(jī)的結(jié)構(gòu)主要可分為兩部分,,即定子部分和轉(zhuǎn)子部分。其中定子的結(jié)構(gòu)與旋轉(zhuǎn)變壓器的定子基本相同,,在定子鐵心中也安放著空間互成90度電角度的兩相繞組,。其中一組為激磁繞組,另一組為控制繞組,,交流伺服電動(dòng)機(jī)是一種兩相的交流電動(dòng)機(jī),。
兩者的優(yōu)缺點(diǎn)對(duì)比
直流伺服電機(jī)分為有刷和無刷電機(jī),有刷電機(jī)成本低,,結(jié)構(gòu)簡單,,啟動(dòng)轉(zhuǎn)矩大,調(diào)速范圍寬,,控制容易,,需要維護(hù),但維護(hù)方便(換碳刷),,會(huì)產(chǎn)生電磁干擾,,對(duì)環(huán)境有要求。因此它可以用于對(duì)成本敏感的普通工業(yè)和民用場合,。無刷電機(jī)體積小,,重量輕,出力大,,響應(yīng)快,速度高,,慣量小,,轉(zhuǎn)動(dòng)平滑,力矩穩(wěn)定,。
直流伺服電機(jī)容易實(shí)現(xiàn)智能化,,其電子換相方式靈活,可以方波換相或正弦波換相,。電機(jī)免維護(hù)不存在碳刷損耗的情況,,效率很高,運(yùn)行溫度低噪音小,,電磁輻射很小,,長壽命,,可用于各種環(huán)境。
交流伺服電機(jī)的速度控制特性良好,,在整個(gè)速度區(qū)內(nèi)可實(shí)現(xiàn)平滑控制,,幾乎無振蕩,90%以上的高效率,,發(fā)熱少,,高速控制,高精確度位置控制(取決于編碼器精度),,額定運(yùn)行區(qū)域內(nèi),,可實(shí)現(xiàn)恒力矩,慣量低,,低噪音,,無電刷磨損,免維護(hù)(適用于無塵,、易爆環(huán)境),。交流伺服電機(jī)也是無刷電機(jī),分為同步和異步電機(jī),,目前運(yùn)動(dòng)控制中一般都用同步電機(jī),,其功率范圍大,功率可以做到很大,,大慣量,,最高轉(zhuǎn)速低,轉(zhuǎn)速隨功率增大而勻速下降,,適用于低速平穩(wěn)運(yùn)行場合,。
交流伺服電機(jī)的缺點(diǎn)是控制較復(fù)雜,驅(qū)動(dòng)器參數(shù)需要現(xiàn)場調(diào)整PID參數(shù)確定,,而且需要更多的連線來支持其運(yùn)行工作,。
兩者的應(yīng)用領(lǐng)域?qū)Ρ?/p>
直流伺服電機(jī)應(yīng)用在各類數(shù)字控制系統(tǒng)中的執(zhí)行機(jī)構(gòu)驅(qū)動(dòng)以及需要精確控制恒定轉(zhuǎn)速或需要精確控制轉(zhuǎn)速變化曲線的動(dòng)力驅(qū)動(dòng)。由于直流伺服馬達(dá)既具有交流馬達(dá)的結(jié)構(gòu)簡單,、運(yùn)行可靠,、維護(hù)方便等一系列優(yōu)點(diǎn),又具有直流馬達(dá)的運(yùn)行效率高,、無勵(lì)磁損耗以及調(diào)速性能好的特點(diǎn),,故在當(dāng)今國民經(jīng)濟(jì)的各個(gè)領(lǐng)域,如醫(yī)療器械,、儀表儀器,、化工、輕紡以及家用電器等方面的應(yīng)用日益普及。
凡是對(duì)位置,,速度和力矩的控制精度要求比較高的場合,,都可以采用交流伺服驅(qū)動(dòng)。如機(jī)床,、印刷設(shè)備,、包裝設(shè)備、紡織設(shè)備,、激光加工設(shè)備,、機(jī)器人、電子,、制藥,、金融機(jī)具、自動(dòng)化生產(chǎn)線等,。因?yàn)樗欧嘤迷诙ㄎ?、速度控制場合,所以伺服又稱為運(yùn)動(dòng)控制,。
總結(jié)
不管是直流伺服電機(jī)還是交流伺服電機(jī)都是服電機(jī)的一種,,其特點(diǎn)決定了應(yīng)用領(lǐng)域的不同,在實(shí)際應(yīng)用場景里相輔相成,,想互協(xié)助,。伺服電機(jī)的應(yīng)用領(lǐng)域就太多了。只要是要有動(dòng)力源的,,而且對(duì)精度有要求的一般都可能涉及到伺服電機(jī),。如數(shù)控機(jī)床、印刷設(shè)備,、包裝設(shè)備,、紡織設(shè)備、激光加工設(shè)備,、機(jī)器人,、自動(dòng)化生產(chǎn)線等對(duì)工藝精度、加工效率和工作可靠性等要求相對(duì)較高的設(shè)備,,包括你的電腦里面都有這東西,。
伺服參數(shù)設(shè)置
伺服在自動(dòng)化設(shè)備的組成中占有重要地位。伺服是在其額定轉(zhuǎn)速范圍內(nèi),,屬于恒力矩輸出。且本身具有多種反饋調(diào)節(jié),,用來保證伺服的運(yùn)行精度以及輸出力矩的精度,。全功能的伺服控制器擁有3多種控制模式,每種控制模式的控制方法也不一樣,,那么我們?cè)诓煌目刂颇J较?,?yīng)該如何接線,,又應(yīng)該怎樣調(diào)試其參數(shù)呢?
1:位置控制模式,,這是我們最常用的伺服控制模式,,我們可以利用伺服控制器控制伺控制伺服走不同的工作位置,想要達(dá)到控制要求,,我們就需要了解其硬件接線以及其相應(yīng)的參數(shù)調(diào)試,。
根據(jù)接線圖我們可以看出,伺服的功能強(qiáng)大,,擁有很多引腳,,很多功能。但是我們可以根據(jù)自己的需求,,只接其中的部分引腳即可,。(其中7號(hào)引腳需接12~24v,41號(hào)引腳和29號(hào)引腳短接到0v,,必須要接的)然后如果我們用PLC對(duì)伺服進(jìn)行控制,,若是我們接的3,4,5,6號(hào)引腳,則我們需要將3號(hào)和5號(hào)引腳短接到24v,,4號(hào)和6號(hào)引腳串接2KΩ的電阻后分別接到PLC的脈沖輸出和方向輸出端子上,。如果我們用的是1,4,,2,,6號(hào)引腳,則我們不需要串電阻即可,。那么接好線后,,我們需要更改伺服的哪些參數(shù)呢?
參數(shù)的設(shè)置,,小伙伴們可以參考一下伺服的綜合手冊(cè),。
2:速度控制模式,此模式使用較少,,此種模式,,伺服控制器的功能相當(dāng)于一個(gè)變頻器,能夠用模擬量對(duì)伺服的運(yùn)行速度進(jìn)行控制,,其硬件接線圖如下圖所示:
此種控制模式下,,(其中7號(hào)引腳需接12~24v,41號(hào)引腳和29號(hào)引腳短接到0v,,必須要接的),,我們可以將0~10v的電壓接到14以及15號(hào)引腳上,設(shè)置好相關(guān)參數(shù)之后,我們就可以通過改變0~10v的電壓來控制電機(jī)的運(yùn)行速度,,其中有一點(diǎn)要注意,,我們可以將電壓變?yōu)?v用來停止電機(jī)的運(yùn)行,但是通常情況下,,模擬量不會(huì)完全為0,,因此我們可以控制26號(hào)引腳,通過接通26號(hào)引腳,,將伺服停止,。想要使用此功能,需要對(duì)Pr315設(shè)置,,將其值改為1后,,保存到驅(qū)動(dòng)器中即可。
速度控制模式參數(shù)設(shè)置
其中這些參數(shù)如何設(shè)置,,需要根據(jù)小伙伴們的具體使用情況去設(shè)置,,小伙伴可以參考一下使用手冊(cè)哦。上面有更詳細(xì)的參數(shù)說明呢,。
3:力矩控制模式,,這里小編就簡單的上一個(gè)接線圖和伺服調(diào)試參數(shù)圖供小伙伴參考吧!