什么是伺服控制系統(tǒng)與編碼器,?編碼器的主要作用及應(yīng)用介紹,!
“伺服”英文servo—詞源于希臘語(yǔ)“奴隸”的意思,。人們想把“伺服機(jī)構(gòu)”當(dāng)個(gè)得心應(yīng)手的馴服工具,,服從控制信號(hào)的要求而動(dòng)作。在訊號(hào)來(lái)到之前,,靜止不動(dòng),;訊號(hào)來(lái)到之后,立即轉(zhuǎn)動(dòng),;當(dāng)訊號(hào)消失,,能即時(shí)自行停轉(zhuǎn)。由于它的“伺服-奴隸”性能,,因此而得名——伺服控制系統(tǒng),。

伺服定義:
(1)伺服系統(tǒng):是使物體的位置,、方位、狀態(tài),、力矩等運(yùn)動(dòng)執(zhí)行器的輸出,,能夠跟隨輸入量(或給定值)的任意變化而變化的自動(dòng)控制系統(tǒng)。
(2)在自動(dòng)控制系統(tǒng)中,,能夠以一定的準(zhǔn)確度響應(yīng)控制信號(hào)的系統(tǒng)稱為隨動(dòng)系統(tǒng),,亦稱伺服系統(tǒng)。為保證這種即時(shí)響應(yīng)的準(zhǔn)確性,,一般都有位置,、速度、力矩的傳感器反饋比較,,也稱為閉環(huán)控制,。
伺服的主要任務(wù)是按控制命令的要求,對(duì)功率進(jìn)行放大,、變換與調(diào)控等處理,,使驅(qū)動(dòng)裝置輸出的力矩,、速度和位置的閉環(huán)控制得非常靈活方便。
簡(jiǎn)單的說(shuō),,就是運(yùn)動(dòng)系統(tǒng)的位置、時(shí)間與力的每時(shí)每刻的“聽(tīng)話”,,在什么時(shí)間上在什么位置,,在這個(gè)位置輸出多大的力的控制,就叫伺服控制,。
這其中,,如果運(yùn)動(dòng)系統(tǒng)是用電機(jī)帶動(dòng)的,那么電機(jī)的位置與電機(jī)輸入的工作電流對(duì)應(yīng)關(guān)系,,就是伺服控制系統(tǒng)要解決的問(wèn)題,,在什么位置上輸入電機(jī)多大的電壓電流(包括相位),這個(gè)稱為位置環(huán)和電流環(huán)控制,。而位置在時(shí)間上的變化量,,就是速度環(huán),速度環(huán)的變化是加速度,、加加速度,。從物理學(xué)我們知道,加速度對(duì)應(yīng)的是力(例如重力加速度G),,而電機(jī)的輸出力是有輸入的電壓電流(包括相位)推動(dòng)的,,那么從電機(jī)輸入來(lái)說(shuō)是電流環(huán)=力,從電機(jī)傳感器的反饋來(lái)說(shuō)是加速度=力,,通過(guò)對(duì)于電機(jī)上傳感器的反饋,,獲得位置與加速度信息,與控制輸入做比較,,形成一個(gè)閉環(huán)的伺服控制系統(tǒng),。
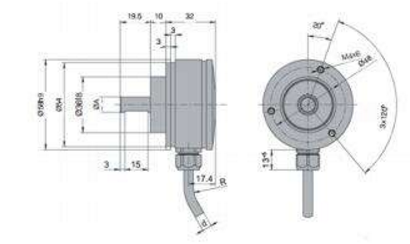
旋轉(zhuǎn)編碼器是旋轉(zhuǎn)位置傳感器,輸出增量的脈沖信號(hào)(代表位置變化量)或絕對(duì)值的角度位置信號(hào),,這個(gè)信號(hào)對(duì)于時(shí)間的一次導(dǎo)數(shù)是速度,,二次導(dǎo)數(shù)是加速度。因此,,旋轉(zhuǎn)編碼器成為伺服系統(tǒng)的最佳的反饋傳感器選擇,。
伺服電機(jī):
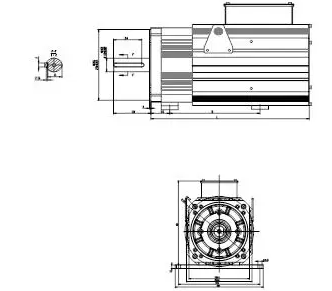
電機(jī)是最常用的運(yùn)動(dòng)執(zhí)行器,電機(jī)驅(qū)動(dòng)器直接就有位置,、速度,、力矩的閉環(huán)控制的,就稱為“伺服電機(jī)”,。常用的伺服電機(jī)為交流永磁同步電機(jī),,有時(shí)就直接把交流永磁同步電機(jī)叫為了伺服電機(jī),。
交流永磁同步電機(jī):
就是轉(zhuǎn)子是由永磁材料構(gòu)成,所以轉(zhuǎn)動(dòng)后,,隨著電機(jī)的定子旋轉(zhuǎn)磁場(chǎng)的變化,,轉(zhuǎn)子也做響應(yīng)頻率的速度變化,而且轉(zhuǎn)子速度=定子磁力推動(dòng)速度,,所以稱"同步",。交流永磁同步電機(jī)因其同步性推動(dòng)要求而加裝有編碼器,這種編碼器不僅僅提供角度位置信號(hào)(例如增量的脈沖信號(hào)或絕對(duì)值的數(shù)字信號(hào)),,同時(shí)提供了轉(zhuǎn)子的位置換相信號(hào)(例如UVW或單圈正余弦C,、D信號(hào)),角度位置信號(hào)作為位置和速度的閉環(huán)反饋,,而轉(zhuǎn)子換相信號(hào)用于電機(jī)電流環(huán)-力矩的推力輸入閉環(huán)反饋,,以獲得轉(zhuǎn)子同步旋轉(zhuǎn)。由此,,交流永磁同步電機(jī)由于直接加裝了編碼器,,已獲得位置、速度,、力矩的反饋信息及閉環(huán)控制,,而天然地具有了“伺服”特性。
而事實(shí)上不僅僅是交流永磁同步電機(jī)可以具有伺服特性,,交流異步電機(jī)通過(guò)其控制器(變頻器)和傳感器反饋(例如編碼器),,同樣可以由控制器指令實(shí)現(xiàn)位置、速度,、甚至輸出力矩的閉環(huán)控制與隨動(dòng)響應(yīng),,也就一樣可以實(shí)現(xiàn)“伺服”系統(tǒng)特性。
是否能夠稱為“伺服”在于其在位置,、速度,、輸出力各方面的隨動(dòng)響應(yīng)和控制精度是否能達(dá)到使用要求,并不在于用什么電機(jī)執(zhí)行器,。
伺服驅(qū)動(dòng)控制器在發(fā)展了變頻技術(shù)的前提下,,在驅(qū)動(dòng)器內(nèi)部的電流環(huán),速度環(huán)和位置環(huán)都進(jìn)行了比一般變頻更精確的控制技術(shù)和算法運(yùn)算,,在功能上也比傳統(tǒng)的變頻器強(qiáng)大很多,,主要的一點(diǎn)可以進(jìn)行精確的位置控制。通過(guò)上位控制器發(fā)送的指令來(lái)控制速度和位置(當(dāng)然也有些變頻-伺服器內(nèi)部集成了控制單元或通過(guò)總線通訊的方式直接將位置和速度等參數(shù)設(shè)定在驅(qū)動(dòng)器里,,或稱為PG卡),,驅(qū)動(dòng)器內(nèi)部的算法和更快更精確的計(jì)算以及性能更優(yōu)良的電子器件使之更優(yōu)越于變頻器。
變頻控制器與電機(jī)構(gòu)成一個(gè)速度變化控制的開(kāi)環(huán)控制,步進(jìn)電機(jī)與驅(qū)動(dòng)器構(gòu)成一個(gè)位置(步進(jìn))變化的開(kāi)環(huán)控制,,如果在變頻電機(jī)系統(tǒng)或步進(jìn)電機(jī)系統(tǒng)加裝了傳感器(例如編碼器),,從而由外部指令控制器(例如PLC或集成在電機(jī)驅(qū)動(dòng)器內(nèi)的控制卡)也能實(shí)現(xiàn)位置、速度的雙閉環(huán),,并同時(shí)對(duì)于電機(jī)輸出力與停止定位上的響應(yīng)保證,,也就能實(shí)現(xiàn)一個(gè)“伺服”控制系統(tǒng)。
伺服控制系統(tǒng)不僅僅是指運(yùn)動(dòng)執(zhí)行器電機(jī),,同樣包含了機(jī)械傳動(dòng)系統(tǒng),,例如減速箱、推動(dòng)絲杠,、齒輪傳動(dòng)等等,這些機(jī)械傳動(dòng)系統(tǒng)有機(jī)械加工與裝配誤差,,同時(shí)又有溫度變化,、磨損及其他現(xiàn)場(chǎng)環(huán)境因素帶來(lái)的影響而產(chǎn)生誤差,為防止這些誤差帶來(lái)的控制精度影響,,有時(shí)會(huì)在運(yùn)動(dòng)終端再加裝傳感器,,作為反饋位置、速度信息到伺服控制系統(tǒng),,以修正這種誤差,,這樣的控制方式稱為“全閉環(huán)”控制,例如加裝直線光柵尺或旋轉(zhuǎn)編碼器,。為保證位置控制的長(zhǎng)期準(zhǔn)確性,,需要在控制-執(zhí)行系統(tǒng)中加裝零點(diǎn)位置傳感器或終端位置絕對(duì)值編碼器,絕對(duì)值編碼器因其傳感器內(nèi)部預(yù)先的每個(gè)機(jī)械位置的唯一編碼,,而無(wú)需擔(dān)心信號(hào)受到外部的干擾影響和停電后的位置信息丟失,。
無(wú)論是交流永磁同步電機(jī)(也就是直接稱為伺服電機(jī)),還是變頻電機(jī),、步進(jìn)電機(jī)等機(jī)械執(zhí)行運(yùn)動(dòng)器,,都需要由控制器、機(jī)械傳動(dòng)系統(tǒng),、終端傳感器反饋修正,,才能構(gòu)成一個(gè)完整的“伺服”控制系統(tǒng)。伺服系統(tǒng)的控制精度(位置精度與隨動(dòng)時(shí)間響應(yīng)),,由執(zhí)行器電機(jī),、電機(jī)驅(qū)動(dòng)器、機(jī)械傳動(dòng)執(zhí)行,、系統(tǒng)總控制器等共同構(gòu)成,,交流永磁同步電機(jī)與驅(qū)動(dòng)器因其“同步”要求的先天設(shè)計(jì)性,其伺服控制精度最高。但要保證其運(yùn)動(dòng)執(zhí)行終端的控制精度與控制可靠性,,還需要兼顧機(jī)械傳動(dòng)系統(tǒng)的精度與終端位置傳感器(例如絕對(duì)值編碼器)的精度與可靠性保證,。
例如電梯轎廂升降的閉環(huán)控制,在電梯提升的主機(jī)上已經(jīng)裝有編碼器(例如德國(guó)海德漢的ERN1387),,提供增量的A,、B正余弦信號(hào),每周2048個(gè)脈沖周期,,同時(shí)提供單圈一個(gè)周期的C,、D正余弦信號(hào),單圈的C、D正余弦信號(hào)經(jīng)過(guò)粗糙的位置分割,,可以提供電機(jī)UVW的換相信息,;而每周2048個(gè)周期的正余弦信號(hào),經(jīng)過(guò)更進(jìn)一步的細(xì)分,,可獲得高分辨率的位置變化,,這種高分辨率的位置變化信息主要用于很短時(shí)間的加速度計(jì)算,因?yàn)樵跁r(shí)間變量很小的情況下需要準(zhǔn)確的加速度反饋,,就需要有較多的位置變化信息,,這就需要編碼器的分辨率非常高,并且位置精度準(zhǔn)確,,這樣可以保證獲得精確加速度反饋,,以控制電機(jī)輸入電流。
但是由于電梯機(jī)械系統(tǒng)上的機(jī)械誤差,,電梯在每層停止時(shí)仍然需要由外部的平層傳感器反饋,,才能獲得準(zhǔn)確定位,例如用平層光電開(kāi)關(guān),,或者直接再用平層絕對(duì)值多圈編碼器,,才能構(gòu)成一個(gè)位置準(zhǔn)確的閉環(huán)伺服系統(tǒng)。
實(shí)際上伺服系統(tǒng)需要的編碼器可能有兩個(gè)(或者只用一個(gè)),,一個(gè)是在電機(jī)上高速端,,針對(duì)電機(jī)的換相與加速度反饋,這個(gè)反饋進(jìn)入電機(jī)驅(qū)動(dòng)器,,決定電機(jī)的控制電流的換相與大?。丨h(huán)),另一個(gè)是用于位置終端低速端的準(zhǔn)確定位,。在電機(jī)端的編碼器需要高分辨率,,常用高分辨率增量編碼器,以獲得加速度的精細(xì)變化量,;而在運(yùn)動(dòng)終端的編碼器需要位置上的準(zhǔn)確與可靠,,常用絕對(duì)值多圈編碼器(也有用直線光柵尺),。
如果只用一個(gè)編碼器(例如只用電機(jī)端編碼器),那就需要在位置上依賴機(jī)械傳動(dòng)部分的高精度,,而目前高精度的機(jī)械傳動(dòng)幾乎都掌握在日系和德系廠家手中,,由他們壟斷。在終端加裝傳感器(編碼器),,是避開(kāi)這種壟斷的一種辦法,。
在變頻器控制系統(tǒng)中,由于不需要電機(jī)換相信號(hào),,編碼器也就可以直接就裝在了運(yùn)動(dòng)終端,,也稱為低速端。
我們有兩個(gè)概念,,一個(gè)是伺服系統(tǒng),,另一個(gè)是伺服電機(jī),這兩個(gè)并不是同一個(gè)概念,。伺服電機(jī)是一種特別的執(zhí)行器,,它的電機(jī)驅(qū)動(dòng)設(shè)計(jì)從一開(kāi)始就是位置、速度,、力矩的電機(jī)閉環(huán)控制,,但是電機(jī)作為執(zhí)行器的一部分,,它并不能代表整個(gè)伺服系統(tǒng),。
閉環(huán)控制能不能都稱為伺服系統(tǒng)?不是,,而是在空間(位置)精度與時(shí)間響應(yīng)上達(dá)到快速控制與精度的保證,。但是隨動(dòng)的“快速”與位置的精度都是相對(duì)的,總是會(huì)有一定的偏差的,,這也同樣是伺服的特性之一,,真正做伺服的就是去消除這個(gè)偏差對(duì)于控制結(jié)果的影響。
編碼器的主要作用與應(yīng)用有哪些,?
編碼器通常用于測(cè)量信號(hào)運(yùn)動(dòng)和反饋,,但其配置、性能和應(yīng)用領(lǐng)域差異很大,。
在速度,、距離和方向反饋系統(tǒng)中,編碼器必須充分利用其功能,。簡(jiǎn)而言之,,編碼器主要檢測(cè)和控制可用于調(diào)整或監(jiān)控傳輸?shù)倪\(yùn)動(dòng)傳感器。
編碼器:通常用于精確測(cè)量線性或旋轉(zhuǎn)運(yùn)動(dòng),。不同的應(yīng)用場(chǎng)景因設(shè)計(jì)和通信方式而異,。
線性編碼器:
這種類型的傳感器頭通常用于精確測(cè)量線性運(yùn)動(dòng),并且傳感器頭沿著導(dǎo)軌安裝在機(jī)械運(yùn)動(dòng)部件上。該傳感器連接到編碼器的內(nèi)部刻度,,并向控制器發(fā)送數(shù)字或模擬信號(hào),。
旋轉(zhuǎn)式編碼器:
旋轉(zhuǎn)式編碼器可以精確地測(cè)量旋轉(zhuǎn)運(yùn)動(dòng)。它們通常收集關(guān)于繞旋轉(zhuǎn)軸運(yùn)動(dòng)變化的信息,。盡管它們非常精確,。然而,在為發(fā)動(dòng)機(jī)選擇正確的編碼時(shí),,技術(shù)工程師需要考慮對(duì)發(fā)動(dòng)機(jī)性能影響最大的編碼器的五個(gè)主要特性:定位精度,、速度穩(wěn)定性、聲音噪聲,、功率損耗和帶寬,。
絕對(duì)輸出和增量輸出之間的差異:
通常,編碼器必須這樣做,,因?yàn)樗鼈兊慕Y(jié)構(gòu)和操作非常不同,。增量編碼器相對(duì)于起點(diǎn)進(jìn)行測(cè)量。每次打開(kāi)系統(tǒng)時(shí),,都會(huì)創(chuàng)建一個(gè)新的空參考點(diǎn),,或者用戶必須創(chuàng)建一個(gè)新空參考點(diǎn)。當(dāng)編碼器旋轉(zhuǎn)時(shí),,控制器或光盤(pán)上的字符或步長(zhǎng)之間的距離相同,。編碼器從每個(gè)信號(hào)中產(chǎn)生脈沖信號(hào),并將其轉(zhuǎn)換為通信信號(hào),。
另一方面,,絕對(duì)價(jià)值提供者總是承認(rèn)不同的立場(chǎng)。它是相互獨(dú)立的,,不需要零重建,。不同的磁道或字符向串行控制器傳輸唯一的代碼,而不是每個(gè)位置的對(duì)應(yīng)字符,。
磁性編碼器和光學(xué)編碼器的區(qū)別:
編碼器以不同的方式檢測(cè)和處理不同的編碼或標(biāo)記,。磁編碼器使用靜態(tài)和/或動(dòng)態(tài)磁場(chǎng)或不同路徑之間的關(guān)系,并將其轉(zhuǎn)換為信號(hào),。另一種更常見(jiàn)的類型是光學(xué)設(shè)計(jì),,它使用穿過(guò)玻璃并識(shí)別接收器的光。磁性元件通常更簡(jiǎn)單,、更緊湊,、更耐用,而光學(xué)編碼器則高度準(zhǔn)確,,可以完全在其他磁性區(qū)域工作,。
封閉式和外露式編碼器之間的區(qū)別:
編碼器對(duì)于機(jī)械系統(tǒng)的正常運(yùn)行至關(guān)重要,。微小的偏差或缺陷可能會(huì)在應(yīng)用領(lǐng)域產(chǎn)生顯著的連鎖反應(yīng)。這樣的系統(tǒng)和操作發(fā)生在各種典型的環(huán)境中,,從可以高速和高壓將制冷劑和/或金屬芯片轉(zhuǎn)移到無(wú)菌醫(yī)學(xué)實(shí)驗(yàn)室的機(jī)器,。
壓縮和暴露編碼器提供了適合其應(yīng)用環(huán)境類型的選項(xiàng)。關(guān)閉編碼器以封裝編碼器的最精確組件,,并確保沒(méi)有可能的雜質(zhì),。外露編碼器占用的空間較小,通常在高精度測(cè)量領(lǐng)域常用的高速場(chǎng)景中工作良好,。
編碼器的應(yīng)用有哪些?
編碼器是許多機(jī)械系統(tǒng)中的關(guān)鍵部件,。它們?cè)谥貜?fù)使用大型機(jī)器、制造高精度原型或進(jìn)行精密工作的工業(yè)環(huán)境中非常常見(jiàn),。
工業(yè)電子用編碼器:
代碼對(duì)于先進(jìn)電子產(chǎn)品的制造至關(guān)重要,,這是世界上增長(zhǎng)最快的行業(yè)之一。在電子領(lǐng)域,,旋轉(zhuǎn)式編碼器,、角度編碼器和線性設(shè)備以這樣或那樣的方式使用??紤]到相對(duì)較小的工作表面和部件,,具有更高精度和精度的編碼器通常是最佳選擇,尤其是在半導(dǎo)體制造中,。真空環(huán)境在電子產(chǎn)品的生產(chǎn)過(guò)程中非常常見(jiàn),。編碼器,包括角度傳感器和線性編碼器,,應(yīng)根據(jù)真空操作產(chǎn)生的獨(dú)特通風(fēng),、氣體和溫度條件進(jìn)行設(shè)計(jì),。
數(shù)控機(jī)床用編碼器:
數(shù)控機(jī)床必須固定在具有大型零件和主軸,、多軸運(yùn)動(dòng)和快速操作的位置。旋轉(zhuǎn)式編碼器是所有零件銑削,、鉆孔和正確鉆孔的重要組成部分,。對(duì)于數(shù)控機(jī)床編程,我們還開(kāi)發(fā)了一些流行的控制系統(tǒng)和觸摸按鈕,。
醫(yī)療用編碼器:
編碼員在醫(yī)療行業(yè)脫穎而出,,具有準(zhǔn)確、安全地檢測(cè),、診斷和治療人員以及開(kāi)發(fā)新的實(shí)驗(yàn)室程序所需的精度,。例如,您可能會(huì)發(fā)現(xiàn)將編碼器用于CT和MRI掃描儀有助于保持準(zhǔn)確的成像并確?;颊甙踩?。放射治療是另一種精確的線性和角度技術(shù),,不允許錯(cuò)誤使用。
機(jī)器人用編碼器:
無(wú)論是用于在生產(chǎn)工廠中拾取和放置生產(chǎn)工廠的鉸接臂,,還是更多的移動(dòng),、自動(dòng)化和受控機(jī)器人,它們都使用編碼器,。原則上,,自動(dòng)化系統(tǒng)需要高效的速度和位置反饋系統(tǒng)才能在有限的人力支持下運(yùn)行。在大多數(shù)情況下,,小型編碼器最適合機(jī)器人設(shè)計(jì),,因此這些必要的技術(shù)可以集成到適合其使用的機(jī)器人中。
編碼器通常用于測(cè)量信號(hào)運(yùn)動(dòng)和反饋,,但其配置,、性能和應(yīng)用領(lǐng)域差異很大。他們?cè)谏畹膸缀跛蓄I(lǐng)域都發(fā)揮了重要作用,,尤其是在促進(jìn)工業(yè)和技術(shù)方面,。