伺服驅(qū)動(dòng)器常見(jiàn)故障有哪些,?伺服驅(qū)動(dòng)器燒壞的原因分析,!
伺服驅(qū)動(dòng)器常見(jiàn)的13種故障及維修知識(shí)伺服電機(jī)常因長(zhǎng)期連續(xù)使用或用戶操作不當(dāng)而出現(xiàn)故障,維護(hù)相對(duì)復(fù)雜,。小編為大家收集了伺服電機(jī)常見(jiàn)的13種故障維修方法供大家學(xué)習(xí),。

一,、伺服電機(jī)啟動(dòng)前應(yīng)做哪些工作
1)測(cè)量絕緣電阻(低壓電機(jī)不應(yīng)小于0.5m)。
2)測(cè)量電源電壓,,檢查電機(jī)接線是否正確,,電源電壓是否符合要求。
3)檢查起動(dòng)設(shè)備是否完好,。
4)檢查保險(xiǎn)絲是否合適,。
5)檢查電機(jī)的接地、零連接是否良好,。
6)檢查傳輸設(shè)備是否有缺陷,。
7)檢查電機(jī)環(huán)境是否合適,,清除易燃物等雜物。
二,、伺服電機(jī)軸承過(guò)熱的原因有哪些
電動(dòng)機(jī)本身:
1)軸承內(nèi)外環(huán)過(guò)緊,。
2)零件形狀和位置公差存在問(wèn)題,如機(jī)架,、端蓋,、軸等零件同軸度差。
3)軸承選擇不當(dāng),。
4)軸承潤(rùn)滑不良或軸承清洗不干凈,,油脂中有雜物。
5)軸電流,。
用法:
1)機(jī)組安裝不當(dāng),,電機(jī)軸與拖動(dòng)裝置同軸度符合要求。
滑輪太緊了,。
3)軸承保養(yǎng)不好,,潤(rùn)滑脂不足或超過(guò)使用壽命,干燥變質(zhì),。
三,、伺服電機(jī)三相電流不平衡的原因是什么
1)三相電壓不平衡。
2)電機(jī)相分支焊接不良或接觸不良,。
3)電機(jī)繞組電阻匝間短路或接地匝間短路,。
4)接線錯(cuò)誤。
四,、如何控制伺服電機(jī)的轉(zhuǎn)速
伺服電機(jī)是典型的閉環(huán)反饋系統(tǒng),,由電機(jī)齒輪組驅(qū)動(dòng),末端(輸出)檢測(cè)到線性電位器的位置,,并將電位器角度坐標(biāo)的比例轉(zhuǎn)換成比例電壓反饋給控制線線板,。控制電路板和輸入脈沖信號(hào)控制,,校正脈沖,,并驅(qū)動(dòng)電機(jī)正向或反向旋轉(zhuǎn),輸出齒輪組的位置與期望值一致,,并校正脈沖趨于0,,從而達(dá)到精確定位和伺服電機(jī)轉(zhuǎn)速控制的目的。
五,、觀察電機(jī)運(yùn)轉(zhuǎn)時(shí)碳刷與換向器之間是否有火花,,并修理火花的程度
1).只有2~4個(gè)微小的火花。如果換向器表面是平的,。在大多數(shù)情況下,,這是不必要的修復(fù),;
沒(méi)有火花。沒(méi)有維護(hù),;
3),、有4個(gè)以上的小火花,而有1~3個(gè)大火花,,不需要拆卸電樞,,只需用砂紙打磨碳刷換向器;
4).如果有四個(gè)以上的大火花,,換向器需要用砂紙打磨,,碳刷和電樞必須拆除。更換碳刷,,研磨碳刷,。
六、換向器維護(hù)
1).換向器表面明顯不平整(用手觸摸)或電機(jī)運(yùn)行時(shí)出現(xiàn)火花,,如第四種情況,。這時(shí)需要拆卸電樞,用精密機(jī)床加工變流器,;
2)、基本光滑,,只帶有極小的疤痕或火花,,如第二例L口砂紙手工打磨無(wú)需去除電樞打磨。磨:按下?lián)Q向器外弧簡(jiǎn)略,,加工一木工具,,切成幾層厚的防水砂紙作為換向器條寬,去掉碳刷,,請(qǐng)注意去掉碳刷和手柄槽上的碳刷痕跡,,安裝時(shí)不會(huì)錯(cuò))用袋砂紙糊好換向器四周的木器,另一只手按電機(jī)旋轉(zhuǎn)方向,,輕輕旋轉(zhuǎn)換向器軸進(jìn)行打磨,。當(dāng)砂紙過(guò)于盲目而無(wú)法使用時(shí),就使用更細(xì)的砂紙,,直到Z水砂紙(或金相砂紙)用完為止,。
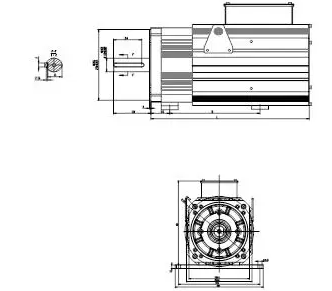
伺服驅(qū)動(dòng)器
七、伺服電機(jī)編碼器相位與轉(zhuǎn)子磁極相位零點(diǎn)對(duì)準(zhǔn)修復(fù)
1.增量式編碼器的相位對(duì)準(zhǔn)
對(duì)于換向號(hào)為UVW的增量式編碼器,,電子換向號(hào)的相位與轉(zhuǎn)子的磁極或電角相位對(duì)齊如下:
1)利用直流電源通過(guò)電機(jī)的直流電流小于額定電流的UV繞組,,U進(jìn),V出,,電機(jī)軸指向平衡位置,;
2)用示波器觀察編碼器的U置信信號(hào)和Z信號(hào),;
3)調(diào)整編碼器轉(zhuǎn)軸與電機(jī)軸的相對(duì)位置;
4)調(diào)整時(shí),,觀察編碼器的U信號(hào)和Z信號(hào)的跳線邊緣,,直到Z信號(hào)穩(wěn)定在高電平(Z信號(hào)默認(rèn)的正常電平為低電平),并鎖定編碼器與電機(jī)的相對(duì)位置關(guān)系,;
5)電機(jī)軸來(lái)回轉(zhuǎn)動(dòng),。釋放后,如果每次電機(jī)軸自由返回平衡位置時(shí)Z信號(hào)穩(wěn)定在高電平,,則定位有效,。
2.絕對(duì)式編碼器的相位對(duì)準(zhǔn)
絕對(duì)編碼器的相位對(duì)準(zhǔn)與單圈編碼器和多圈編碼器沒(méi)有太大的不同。實(shí)際上,,編碼器的檢測(cè)相位與機(jī)電角度的相位在一個(gè)圓內(nèi)對(duì)齊,。目前,一種非常實(shí)用的方法是將編碼器隨機(jī)安裝在電機(jī)軸上后,,利用編碼器內(nèi)部的EEPROM存儲(chǔ)被測(cè)相位,。具體方法如下:
1)將編碼器隨機(jī)安裝在電機(jī)上,即對(duì)編碼器轉(zhuǎn)軸和電機(jī)軸,、編碼器外殼和電機(jī)外殼進(jìn)行加固,;
2)帶直流電源通過(guò)電機(jī)的UV繞組,直流電流小于額定電流,,U進(jìn),,V出,電機(jī)軸指向平衡位置,;
3)隨伺服驅(qū)動(dòng)器讀取絕對(duì)編碼器的單回路位置值并存儲(chǔ)在EEPROM中,,EEPROM記錄編碼器內(nèi)部機(jī)電角度的初始相位;
4)校準(zhǔn)過(guò)程結(jié)束,。
八,、伺服電機(jī)保養(yǎng)運(yùn)動(dòng)現(xiàn)象
在饋電現(xiàn)象、信道化,、速度信號(hào)不穩(wěn)定等現(xiàn)象下,,編碼器出現(xiàn)裂紋;接線端子接觸不良,,如螺釘松動(dòng),;當(dāng)運(yùn)動(dòng)發(fā)生在從正方向向反方向反轉(zhuǎn)的時(shí)刻時(shí),通常是由于進(jìn)給驅(qū)動(dòng)鏈的反向間隙或伺服驅(qū)動(dòng)增益過(guò)大,。
九,、伺服電機(jī)保養(yǎng)爬行現(xiàn)象
大多發(fā)生在起動(dòng)加速段或低速進(jìn)給,一般是由于進(jìn)給傳動(dòng)鏈潤(rùn)滑狀態(tài)差、伺服系統(tǒng)增益低,、外加負(fù)載過(guò)大所致,。尤其應(yīng)該注意的是,使用的耦合連接伺服電機(jī)和滾珠絲桿不同步與滾珠螺桿的旋轉(zhuǎn)伺服電機(jī)由于接頭松動(dòng)或耦合本身的缺陷,,如裂縫,,所以,進(jìn)給運(yùn)動(dòng)是快的和慢的,。
十,、伺服電機(jī)維修時(shí)有振動(dòng)現(xiàn)象
機(jī)床在高速運(yùn)轉(zhuǎn)時(shí),可能會(huì)發(fā)生振動(dòng),,從而產(chǎn)生過(guò)流報(bào)警,。機(jī)床振動(dòng)問(wèn)題一般屬于速度問(wèn)題,因此要尋找速度環(huán)問(wèn)題,。
十一,、伺服電機(jī)維修轉(zhuǎn)矩減少現(xiàn)象
當(dāng)伺服電機(jī)從額定堵轉(zhuǎn)矩運(yùn)行到高速運(yùn)行時(shí),發(fā)現(xiàn)轉(zhuǎn)矩會(huì)突然下降,,這是由于電機(jī)繞組散熱損壞和機(jī)械部分發(fā)熱造成的,。在高速下,電機(jī)溫升增加,,所以在正確使用伺服電機(jī)之前必須檢查電機(jī)的負(fù)載,。
十二、伺服電機(jī)維修位置誤差現(xiàn)象
當(dāng)伺服軸運(yùn)動(dòng)超過(guò)位置公差范圍(KNDSD100出廠標(biāo)準(zhǔn)設(shè)定為PA17:400,,位置公差檢測(cè)范圍)時(shí),,伺服驅(qū)動(dòng)器會(huì)出現(xiàn)“4”位置公差報(bào)警。主要原因有:系統(tǒng)設(shè)置公差范圍??;伺服系統(tǒng)增益設(shè)定不當(dāng),;位置檢測(cè)裝置污染,;進(jìn)料傳動(dòng)鏈的累積誤差過(guò)大。
十三,、伺服電機(jī)維修故障現(xiàn)象
除連接脈沖+方向信號(hào)外,,還有使能控制信號(hào),一般為直流+24V繼電器線圈電壓,。伺服電機(jī)不工作,,常見(jiàn)的診斷方法有:檢查數(shù)控系統(tǒng)是否有脈沖信號(hào)輸出;檢查使能信號(hào)是否連接,;通過(guò)液晶屏觀察系統(tǒng)輸入/輸出狀態(tài)是否滿足進(jìn)給軸的啟動(dòng)條件,;使用電磁制動(dòng)器的伺服電機(jī)確認(rèn)制動(dòng)器已打開(kāi);驅(qū)動(dòng)器故障;伺服電機(jī)故障,;伺服電機(jī)與滾珠絲杠聯(lián)軸器故障或按鍵斷開(kāi),。
伺服驅(qū)動(dòng)器燒壞的原因分析
1.超級(jí)電容型號(hào)不匹配
2.電容器太差而不能損壞
3.如果匹配和質(zhì)量沒(méi)有問(wèn)題,可能是電路的其他元件損壞造成的
4.誤損通常是指電容器在被損壞后,,仍有可能是良誤,。
5.人為原因引起的斷腳
6.安裝環(huán)境故障。
然而,,這些只是伺服驅(qū)動(dòng)器燒壞維修的部分原因,,因此,在伺服驅(qū)動(dòng)器燒壞時(shí),,不要盲目拆卸維修,,否則需要找專業(yè)的維修人員檢測(cè)故障原因并報(bào)價(jià)。Z后決定是否修復(fù),。
又稱“伺服控制器”,、“伺服放大器”,是用來(lái)控制伺服電機(jī)的控制器,,它的作用類似于普通交流電機(jī)上的逆變器,,是伺服系統(tǒng)的一部分,主要用于高精度定位系統(tǒng),。一般采用位置,、速度、轉(zhuǎn)矩三種方式控制伺服電機(jī),,實(shí)現(xiàn)傳動(dòng)系統(tǒng)的高精度定位,。是目前傳動(dòng)技術(shù)的高端產(chǎn)品。
伺服驅(qū)動(dòng)器是現(xiàn)代運(yùn)動(dòng)控制的重要組成部分,,廣泛應(yīng)用于工業(yè)機(jī)器人,、數(shù)控加工中心等自動(dòng)化設(shè)備中。特別是用于控制交流永磁同步電機(jī)的伺服驅(qū)動(dòng)器已成為國(guó)內(nèi)外研究的熱點(diǎn),?;谑噶靠刂频碾娏鳌⑺俣群臀恢茫撤N閉環(huán)控制算法廣泛應(yīng)用于交流伺服驅(qū)動(dòng)器的設(shè)計(jì)中,。該算法的速度閉環(huán)設(shè)計(jì)是否合理,,對(duì)整個(gè)伺服控制系統(tǒng)尤其是速度控制性能起著重要的作用。
在伺服驅(qū)動(dòng)轉(zhuǎn)速回路中,,電機(jī)轉(zhuǎn)子轉(zhuǎn)速的實(shí)時(shí)測(cè)量精度對(duì)提高轉(zhuǎn)速控制的動(dòng)靜態(tài)特性至關(guān)重要,。為了找到測(cè)量精度與系統(tǒng)成本之間的平衡,一般采用增量式光電編碼器作為速度傳感器,,相應(yīng)的速度測(cè)量方法為M/T測(cè)速法,。雖然M/T測(cè)速具有一定的測(cè)量精度和較寬的測(cè)量范圍,但該方法也有其固有的缺陷,包括:1)測(cè)速期間必須檢測(cè)到至少一個(gè)完整的碼盤(pán)脈沖,,限制了Z小可測(cè)速度,;2)用于測(cè)速的兩個(gè)控制系統(tǒng)的定時(shí)器開(kāi)關(guān)難以保持嚴(yán)格的同步,在轉(zhuǎn)速變化較大的測(cè)量場(chǎng)合無(wú)法保證測(cè)速的準(zhǔn)確性,。因此,,采用傳統(tǒng)的速度環(huán)設(shè)計(jì)難以提高伺服驅(qū)動(dòng)器的速度跟蹤和控制性能。