傳感器—將要測(cè)量的物理量轉(zhuǎn)換成可讀取,、處理的另一個(gè)物理量,現(xiàn)代控制中最常用的就是電信號(hào),。 如果把計(jì)算機(jī),、可編程控制器比喻為自動(dòng)化控制的“大腦”,那么傳感器就是自動(dòng)化控制的“眼睛”,是機(jī)電一體化的信息反饋裝置.由計(jì)算機(jī),、執(zhí)行機(jī)構(gòu),、執(zhí)行機(jī)構(gòu)內(nèi)部反饋構(gòu)成的控制系統(tǒng),,稱為開(kāi)環(huán)控制,;由計(jì)算機(jī),、執(zhí)行機(jī)構(gòu)、執(zhí)行機(jī)構(gòu)內(nèi)部反饋、執(zhí)行效果外部傳感器信息反饋構(gòu)成的控制系統(tǒng),,稱為閉環(huán)控制,。傳感器的電信號(hào)有模擬量型和數(shù)字量型,模擬量就是電流或電壓的大小變化模擬被測(cè)量物理量的大小,,如果傳感器輸出的模擬量電信號(hào)已經(jīng)是標(biāo)準(zhǔn)的信號(hào),,例如4—20mA、0—20mA,、1—5V,、0—10V等,這樣的傳感器有時(shí)也稱為變送器,。傳感器的電信號(hào)有時(shí)也用電壓,、電流高于某個(gè)域置或低于某個(gè)域置來(lái)代表1或0的數(shù)字信息,,或用光信號(hào)的通,、暗來(lái)傳遞信息,這樣的傳感器就是數(shù)字量輸出型,。
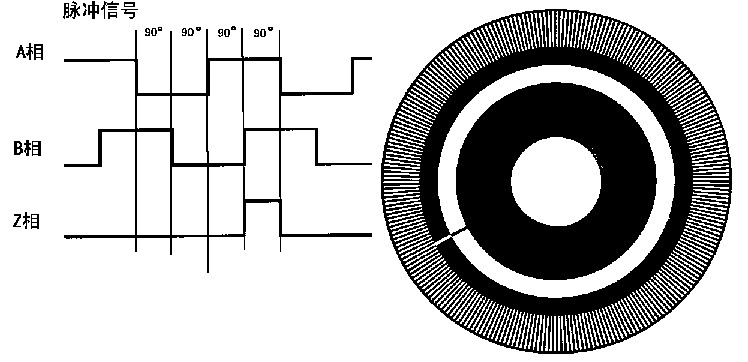
編碼器—角位移,線位移及轉(zhuǎn)速傳感器.編碼器是以數(shù)字化信息將角度,、長(zhǎng)度的信息以編碼的方式輸出的傳感器,其具有高精度,大量程測(cè)量,反應(yīng)快,數(shù)字化輸出特點(diǎn);體積小,重量輕,機(jī)構(gòu)緊湊,安裝方便,維護(hù)簡(jiǎn)單,工作可靠,。編碼器以測(cè)量方式來(lái)分,,有直線型編碼器,角度編碼器,旋轉(zhuǎn)編碼器。如以信號(hào)原理來(lái)分,,有增量型編碼器,絕對(duì)型編碼器,。增 量 型 編 碼 器 (旋轉(zhuǎn)型)工作原理: 由一個(gè)中心有軸的光電碼盤(pán),其上有環(huán)形通,、暗的刻線,,有光電發(fā)射和接收器件讀取,獲得四組正弦波信號(hào)組合成A、B,、C,、D,每個(gè)正弦波相差90度相位差(相對(duì)于一個(gè)周波為360度),將C,、D信號(hào)反向,,疊加在A、B兩相上,,可增強(qiáng)穩(wěn)定信號(hào),;另每轉(zhuǎn)輸出一個(gè)Z相脈沖以代表零位參考位。
由于A,、B兩相相差90度,,可通過(guò)比較A相在前還是B相在前,以判別編碼器的正轉(zhuǎn)與反轉(zhuǎn),通過(guò)零位脈沖,,可獲得編碼器的零位參考位,。
編碼器碼盤(pán)的材料有玻璃、金屬,、塑料,,玻璃碼盤(pán)是在玻璃上沉積很薄的刻線,其熱穩(wěn)定性好,,精度高,,金屬碼盤(pán)直接以通和不通刻線,不易碎,,但由于金屬有一定的厚度,,精度就有限制,其熱穩(wěn)定性就要比玻璃的差一個(gè)數(shù)量級(jí),,塑料碼盤(pán)是經(jīng)濟(jì)型的,,其成本低,但精度,、熱穩(wěn)定性,、壽命均要差一些。
分辨率—編碼器以每旋轉(zhuǎn)360度提供多少的通或暗刻線稱為分辨率,,也稱解析分度,、或直接稱多少線,一般在每轉(zhuǎn)分度5~10000線,。
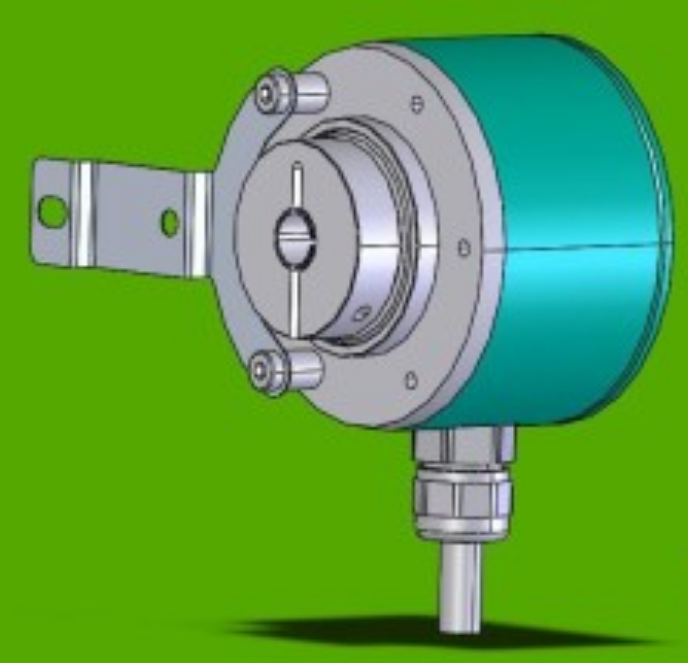
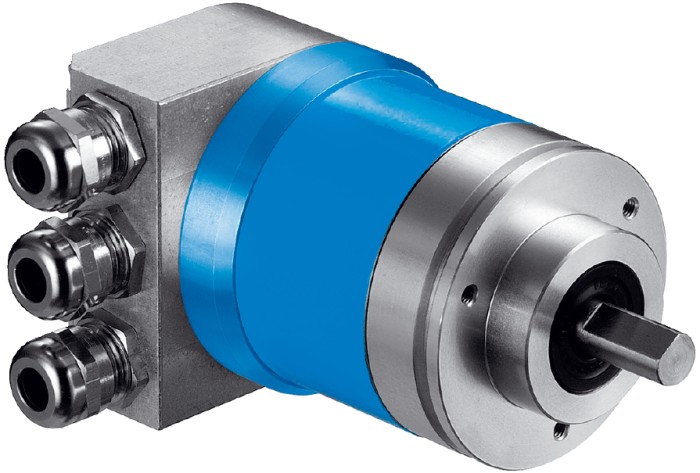
編碼器機(jī)械外型—編碼器以轉(zhuǎn)軸類型分,,有軸型和軸套型;以外形特征和安裝法蘭分,,有同步法蘭,夾緊法蘭,緊湊型;軸套型又有半空型,、全空型、大軸徑型,。
編碼器軸徑—編碼器軸徑有6毫米*,、8毫米、10毫米*,、12毫米,,軸套型的有8毫米、10毫米,、12*毫米,、大口徑20—50*毫米,帶*號(hào)的是常規(guī)規(guī)格,。
機(jī)械轉(zhuǎn)速和電氣轉(zhuǎn)速編碼器的機(jī)械轉(zhuǎn)速以每分鐘最大可以旋轉(zhuǎn)多少圈表示—rpm;編碼器的電氣轉(zhuǎn)速也稱為開(kāi)關(guān)頻率,,是讀取每個(gè)脈沖信號(hào)的反應(yīng)速度,,以每秒多少次表示--Hz最大工作速度應(yīng)同時(shí)兼顧編碼器的機(jī)械轉(zhuǎn)速、電氣轉(zhuǎn)速以及編碼器后續(xù)接收設(shè)備的開(kāi)關(guān)頻率,。Nmax=Fmax×60/Z ; N—min-1 ;F—Hz編碼器的工作溫度和防護(hù)等級(jí)編碼器的最高最低工作溫度代表了編碼器內(nèi)部機(jī)械和電子零件的水平,,較好的編碼器工作溫度從-40到100℃,事實(shí)上低溫情況下,,受限制的是內(nèi)部電子零件和外部的電纜以及密封特性,。
防護(hù)等級(jí)是指編碼器的防塵、防水性能,,以國(guó)際標(biāo)準(zhǔn)IP的兩位數(shù)表示,,第一位0—6代表防塵,第二位0—7代表防水,,IP54是最低的有限制條件的防塵防水標(biāo)準(zhǔn),,IP67可防水浸。并非在室內(nèi)恒溫條件下工作就不需要防水,,因?yàn)榫幋a器在工作和停機(jī)兩種情況下,,內(nèi)部空氣會(huì)熱脹冷縮,密封不好,,在停機(jī)是會(huì)有壓縮性水氣進(jìn)入,。專業(yè)的編碼器的防護(hù)等級(jí)分電氣外殼部分和轉(zhuǎn)軸部分,,有不同,。轉(zhuǎn)軸部分由于編碼器的旋轉(zhuǎn)要求,往往要略低,。
工作電壓,、耗電流—工作電壓一般有10—30Vdc和5Vdc±10%兩種,電壓和耗電流決定供電電源的功率,。信號(hào)輸出:信號(hào)輸出有正弦波(電流或電壓),方波(TTL,、HTL),集電極開(kāi)路(PNP、NPN),推拉式多種形式,,其中TTL為長(zhǎng)線差分驅(qū)動(dòng)(對(duì)稱A,A-;B,B-;Z,Z-),HTL也稱推拉式,、推挽式輸出,編碼器的信號(hào)接收設(shè)備接口應(yīng)與編碼器對(duì)應(yīng),。
信號(hào)連接—編碼器的脈沖信號(hào)一般連接計(jì)數(shù)器,、PLC、計(jì)算機(jī),,PLC和計(jì)算機(jī)連接的模塊有低速模塊與高速模塊之分,,開(kāi)關(guān)頻率有低有高。
如單相聯(lián)接,,用于單方向計(jì)數(shù),,單方向測(cè)速,。A、 B兩相聯(lián)接,,用于正反向計(jì)數(shù),、判斷正反向和測(cè)速。A,、B,、Z三相聯(lián)接,用于帶參考位修正的位置測(cè)量,。A,、A-,B,、B-,,Z、Z-連接,,由于帶有對(duì)稱負(fù)信號(hào)的連接,,電流對(duì)于電纜貢獻(xiàn)的電磁場(chǎng)為0,衰減最小,,抗干擾最佳,,可傳輸較遠(yuǎn)的距離。對(duì)于TTL的帶有對(duì)稱負(fù)信號(hào)輸出的編碼器,,信號(hào)傳輸距離可達(dá)150米,。對(duì)于HTL的帶有對(duì)稱負(fù)信號(hào)輸出的編碼器,信號(hào)傳輸距離可達(dá)300米,。
倍頻技術(shù)信號(hào)二倍頻??二倍頻信號(hào)通過(guò)A相和B相的”異或”轉(zhuǎn)換獲得

分辨率與精度—分辨率是指?jìng)鞲衅骺梢苑直孀x數(shù)的最小單位,,而精度是指每個(gè)讀數(shù)與標(biāo)準(zhǔn)位置的最大誤差,兩者不是一個(gè)概念,,精度由碼盤(pán)刻線,、轉(zhuǎn)軸同心度、材料的溫度特性,、電子讀數(shù)的即時(shí)等各方面因數(shù)決定,。
電子細(xì)分技術(shù)—利用編碼器的正弦波信號(hào)的相位變化,由電子設(shè)備在一條刻線上再分出多個(gè)位置,,此為電子細(xì)分技術(shù),,這樣原來(lái)的編碼器分辨刻線可以成倍的增加,但是細(xì)分只是提高了分辨刻線,,并沒(méi)有改變?cè)瓉?lái)的精度,。
內(nèi)插細(xì)分—有一些“高分辨數(shù)”的編碼器是由內(nèi)插的電子細(xì)分以提高每圈的刻線,但是其精度并不高,,不能以其提供的高線數(shù)而理解成高精度編碼器,。
內(nèi)置電池—有一些編碼器以內(nèi)置電池來(lái)避免斷電的信號(hào)丟失,,也有一些編碼器以單圈是絕對(duì)信號(hào),而多圈圈數(shù)信號(hào)是內(nèi)置電池與電路用增量計(jì)數(shù)的方法來(lái)獲得,,此為偽絕對(duì)型編碼器,,其受電池壽命、電池低溫失效,、受振電池觸點(diǎn)不良等因數(shù)影響,,而大大降低可靠性。
其他主要參數(shù)根據(jù)需要參看樣本:電纜或插座,,最大傳輸距離,,最大軸負(fù)載,振動(dòng),,沖擊,,啟動(dòng)力矩,轉(zhuǎn)子瞬間慣性等
增量式編碼器的問(wèn)題:增量型編碼器存在零點(diǎn)累計(jì)誤差,,抗干擾較差,,接收設(shè)備的停機(jī)需斷電記憶,開(kāi)機(jī)應(yīng)找零或參考位等問(wèn)題,,這些問(wèn)題如選用絕對(duì)型編碼器可以解決,。
增量型編碼器的一般應(yīng)用:測(cè)速,測(cè)轉(zhuǎn)動(dòng)方向,,測(cè)移動(dòng)角度,、距離(相對(duì))。